[Click here for a PDF of this post with nicer formatting]
In ancient times (i.e. 2nd year undergrad) I recall being very impressed with Tschebyscheff polynomials for designing lowpass filters. I’d used Tschebyscheff filters for the hardware we used for a speech recognition system our group built in the design lab. One of the benefits of these polynomials is that the oscillation in the \( \Abs{x} < 1 \) interval is strictly bounded. This same property, as well as the unbounded nature outside of the \( [-1,1] \) interval turns out to have applications to antenna array design.
The Tschebyscheff polynomials are defined by
\begin{equation}\label{eqn:tschebyscheff:40}
T_m(x) = \cos\lr{ m \cos^{-1} x }, \quad \Abs{x} < 1 \end{equation} \begin{equation}\label{eqn:tschebyscheff:60} T_m(x) = \cosh\lr{ m \cosh^{-1} x }, \quad \Abs{x} > 1.
\end{equation}
Range restrictions and hyperbolic form.
Prof. Eleftheriades’s notes made a point to point out the definition in the \( \Abs{x} > 1 \) interval, but that can also be viewed as a consequence instead of a definition if the range restriction is removed. For example, suppose \( x = 7 \), and let
\begin{equation}\label{eqn:tschebyscheff:160}
\cos^{-1} 7 = \theta,
\end{equation}
so
\begin{equation}\label{eqn:tschebyscheff:180}
\begin{aligned}
7
&= \cos\theta \\
&= \frac{e^{i\theta} + e^{-i\theta}}{2} \\
&= \cosh(i\theta),
\end{aligned}
\end{equation}
or
\begin{equation}\label{eqn:tschebyscheff:200}
-i \cosh^{-1} 7 = \theta.
\end{equation}
\begin{equation}\label{eqn:tschebyscheff:220}
\begin{aligned}
T_m(7)
&= \cos( -m i \cosh^{-1} 7 ) \\
&= \cosh( m \cosh^{-1} 7 ).
\end{aligned}
\end{equation}
The same argument clearly applies to any other value outside of the \( \Abs{x} < 1 \) range, so without any restrictions, these polynomials can be defined as just
\begin{equation}\label{eqn:tschebyscheff:260}
\boxed{
T_m(x) = \cos\lr{ m \cos^{-1} x }.
}
\end{equation}
Polynomial nature.
Eq. \ref{eqn:tschebyscheff:260} does not obviously look like a polynomial. Let’s proceed to verify the polynomial nature for the first couple values of \( m \).
- \( m = 0 \).\begin{equation}\label{eqn:tschebyscheff:280}
\begin{aligned}
T_0(x)
&= \cos( 0 \cos^{-1} x ) \\
&= \cos( 0 ) \\
&= 1.
\end{aligned}
\end{equation} - \( m = 1 \).\begin{equation}\label{eqn:tschebyscheff:300}
\begin{aligned}
T_1(x)
&= \cos( 1 \cos^{-1} x ) \\
&= x.
\end{aligned}
\end{equation} - \( m = 2 \).\begin{equation}\label{eqn:tschebyscheff:320}
\begin{aligned}
T_2(x)
&= \cos( 2 \cos^{-1} x ) \\
&= 2 \cos^2 \cos^{-1}(x) – 1 \\
&= 2 x^2 – 1.
\end{aligned}
\end{equation}
To examine the general case
\begin{equation}\label{eqn:tschebyscheff:340}
\begin{aligned}
T_m(x)
&= \cos( m \cos^{-1} x ) \\
&= \textrm{Re} e^{ j m \cos^{-1} x } \\
&= \textrm{Re} \lr{ e^{ j\cos^{-1} x } }^m \\
&= \textrm{Re} \lr{ \cos\cos^{-1} x + j \sin\cos^{-1} x }^m \\
&= \textrm{Re} \lr{ x + j \sqrt{1 – x^2} }^m \\
&=
\textrm{Re} \lr{
x^m
+ \binom{ m}{1} j x^{m-1} \lr{1 – x^2}^{1/2}
– \binom{ m}{2} x^{m-2} \lr{1 – x^2}^{2/2}
– \binom{ m}{3} j x^{m-3} \lr{1 – x^2}^{3/2}
+ \binom{ m}{4} x^{m-4} \lr{1 – x^2}^{4/2}
+ \cdots
} \\
&=
x^m
– \binom{ m}{2} x^{m-2} \lr{1 – x^2}
+ \binom{ m}{4} x^{m-4} \lr{1 – x^2}^2
– \cdots
\end{aligned}
\end{equation}
This expansion was a bit cavaliar with the signs of the \( \sin\cos^{-1} x = \sqrt{1 – x^2} \) terms, since the negative sign should be picked for the root when \( x \in [-1,0] \). However, that doesn’t matter in the end since the real part operation selects only powers of two of this root.
The final result of the expansion above can be written
\begin{equation}\label{eqn:tschebyscheff:360}
\boxed{
T_m(x) = \sum_{k = 0}^{\lfloor m/2 \rfloor} \binom{m}{2 k} (-1)^k x^{m – 2 k} \lr{1 – x^2}^k.
}
\end{equation}
This clearly shows the polynomial nature of these functions, and is also perfectly well defined for any value of \( x \). The even and odd alternation with \( m \) is also clear in this explicit expansion.
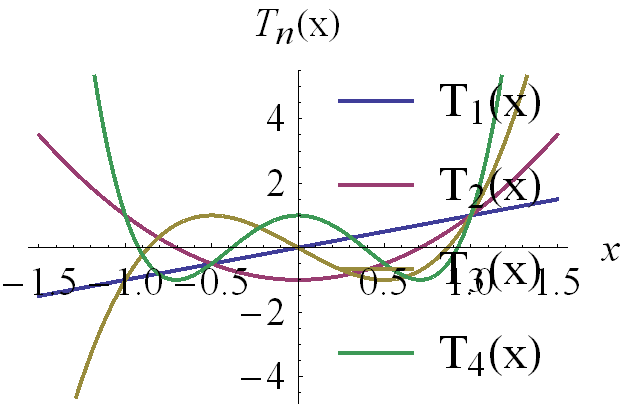
Plots
Properties
In [1] a few properties can be found for these polynomials
\begin{equation}\label{eqn:tschebyscheff:100}
T_m(x) = 2 x T_{m-1} – T_{m-2}
\end{equation}
\begin{equation}\label{eqn:tschebyscheff:420}
0 = \lr{ 1 – x^2 } \frac{d T_m(x)}{dx} + m x T_m(x) – m T_{m-1}(x)
\end{equation}
\begin{equation}\label{eqn:tschebyscheff:400}
0 = \lr{ 1 – x^2 } \frac{d^2 T_m(x)}{dx^2} – x \frac{dT_m(x)}{dx} + m^2 T_{m}(x)
\end{equation}
\begin{equation}\label{eqn:tschebyscheff:440}
\int_{-1}^1 \inv{ \sqrt{1 – x^2} } T_m(x) T_n(x) dx =
\left\{
\begin{array}{l l}
0 & \quad \mbox{if \( m \ne n \) } \\
\pi & \quad \mbox{if \( m = n = 0 \) } \\
\pi/2 & \quad \mbox{if \( m = n, m \ne 0 \) }
\end{array}
\right.
\end{equation}
Recurrance relation.
Prove \ref{eqn:tschebyscheff:100}.
Answer.
To show this, let
\begin{equation}\label{eqn:tschebyscheff:460}
x = \cos\theta.
\end{equation}
\begin{equation}\label{eqn:tschebyscheff:580}
2 x T_{m-1} – T_{m-2}
=
2 \cos\theta \cos((m-1) \theta) – \cos((m-2)\theta).
\end{equation}
Recall the cosine addition formulas
\begin{equation}\label{eqn:tschebyscheff:540}
\begin{aligned}
\cos( a + b )
&=
\textrm{Re} e^{j(a + b)} \\
&=
\textrm{Re} e^{ja} e^{jb} \\
&=
\textrm{Re}
\lr{ \cos a + j \sin a }
\lr{ \cos b + j \sin b } \\
&=
\cos a \cos b – \sin a \sin b.
\end{aligned}
\end{equation}
Applying this gives
\begin{equation}\label{eqn:tschebyscheff:600}
\begin{aligned}
2 x T_{m-1} – T_{m-2}
&=
2 \cos\theta \Biglr{ \cos(m\theta)\cos\theta +\sin(m\theta) \sin\theta }
– \Biglr{
\cos(m\theta)\cos(2\theta) + \sin(m\theta) \sin(2\theta)
} \\
&=
2 \cos\theta \Biglr{ \cos(m\theta)\cos\theta +\sin(m\theta)\sin\theta) }
– \Biglr{
\cos(m\theta)(\cos^2 \theta – \sin^2 \theta) + 2 \sin(m\theta) \sin\theta \cos\theta
} \\
&=
\cos(m\theta) \lr{ \cos^2\theta + \sin^2\theta } \\
&= T_m(x).
\end{aligned}
\end{equation}
First order LDE relation.
Prove \ref{eqn:tschebyscheff:420}.
Answer.
To show this, again, let
\begin{equation}\label{eqn:tschebyscheff:470}
x = \cos\theta.
\end{equation}
Observe that
\begin{equation}\label{eqn:tschebyscheff:480}
1 = -\sin\theta \frac{d\theta}{dx},
\end{equation}
so
\begin{equation}\label{eqn:tschebyscheff:500}
\begin{aligned}
\frac{d}{dx}
&= \frac{d\theta}{dx} \frac{d}{d\theta} \\
&= -\frac{1}{\sin\theta} \frac{d}{d\theta}.
\end{aligned}
\end{equation}
Plugging this in gives
\begin{equation}\label{eqn:tschebyscheff:520}
\begin{aligned}
\lr{ 1 – x^2} &\frac{d}{dx} T_m(x) + m x T_m(x) – m T_{m-1}(x) \\
&=
\sin^2\theta
\lr{
-\frac{1}{\sin\theta} \frac{d}{d\theta}}
\cos( m \theta ) + m \cos\theta \cos( m \theta ) – m \cos( (m-1)\theta ) \\
&=
-\sin\theta (-m \sin(m \theta)) + m \cos\theta \cos( m \theta ) – m \cos( (m-1)\theta ).
\end{aligned}
\end{equation}
Applying the cosine addition formula \ref{eqn:tschebyscheff:540} gives
\begin{equation}\label{eqn:tschebyscheff:560}
m \lr{ \sin\theta \sin(m \theta) + \cos\theta \cos( m \theta ) } – m
\lr{
\cos( m \theta) \cos\theta + \sin( m \theta ) \sin\theta
}
=0.
\end{equation}
} % answer
Second order LDE relation.
Prove \ref{eqn:tschebyscheff:400}.
Answer.
This follows the same way. The first derivative was
\begin{equation}\label{eqn:tschebyscheff:640}
\begin{aligned}
\frac{d T_m(x)}{dx}
&=
-\inv{\sin\theta}
\frac{d}{d\theta} \cos(m\theta) \\
&=
-\inv{\sin\theta} (-m) \sin(m\theta) \\
&=
m \inv{\sin\theta} \sin(m\theta),
\end{aligned}
\end{equation}
so the second derivative is
\begin{equation}\label{eqn:tschebyscheff:620}
\begin{aligned}
\frac{d^2 T_m(x)}{dx^2}
&=
-m \inv{\sin\theta} \frac{d}{d\theta} \inv{\sin\theta} \sin(m\theta) \\
&=
-m \inv{\sin\theta}
\lr{
-\frac{\cos\theta}{\sin^2\theta} \sin(m\theta) + \inv{\sin\theta} m \cos(m\theta)
}.
\end{aligned}
\end{equation}
Putting all the pieces together gives
\begin{equation}\label{eqn:tschebyscheff:660}
\begin{aligned}
\lr{ 1 – x^2 } &\frac{d^2 T_m(x)}{dx^2} – x \frac{dT_m(x)}{dx} + m^2 T_{m}(x) \\
&=
m
\lr{
\frac{\cos\theta}{\sin\theta} \sin(m\theta) – m \cos(m\theta)
}
– \cos\theta m \inv{\sin\theta} \sin(m\theta)
+ m^2 \cos(m \theta) \\
&=
0.
\end{aligned}
\end{equation}
Orthogonality relation
Prove \ref{eqn:tschebyscheff:440}.
Answer.
First consider the 0,0 inner product, making an \( x = \cos\theta \), so that \( dx = -\sin\theta d\theta \)
\begin{equation}\label{eqn:tschebyscheff:680}
\begin{aligned}
\innerprod{T_0}{T_0}
&=
\int_{-1}^1 \inv{\lr{1-x^2}^{1/2}} dx \\
&=
\int_{-\pi}^0 \lr{-\inv{\sin\theta}} -\sin\theta d\theta \\
&=
0 – (-\pi) \\
&= \pi.
\end{aligned}
\end{equation}
Note that since the \( [-\pi, 0] \) interval was chosen, the negative root of \( \sin^2\theta = 1 – x^2 \) was chosen, since \( \sin\theta \) is negative in that interval.
The m,m inner product with \( m \ne 0 \) is
\begin{equation}\label{eqn:tschebyscheff:700}
\begin{aligned}
\innerprod{T_m}{T_m}
&=
\int_{-1}^1 \inv{\lr{1-x^2}^{1/2}} \lr{ T_m(x)}^2 dx \\
&=
\int_{-\pi}^0 \lr{-\inv{\sin\theta}} \cos^2(m\theta) -\sin\theta d\theta \\
&=
\int_{-\pi}^0 \cos^2(m\theta) d\theta \\
&=
\inv{2} \int_{-\pi}^0 \lr{ \cos(2 m\theta) + 1 } d\theta \\
&= \frac{\pi}{2}.
\end{aligned}
\end{equation}
So far so good. For \( m \ne n \) the inner product is
\begin{equation}\label{eqn:tschebyscheff:720}
\begin{aligned}
\innerprod{T_m}{T_m}
&=
\int_{-\pi}^0 \cos(m\theta) \cos(n\theta) d\theta \\
&=
\inv{4} \int_{-\pi}^0
\lr{
e^{j m \theta}
+ e^{-j m \theta}
}
\lr{
e^{j n \theta}
+ e^{-j n \theta}
}
d\theta \\
&=
\inv{4} \int_{-\pi}^0
\lr{
e^{j (m + n) \theta}
+e^{-j (m + n) \theta}
+e^{j (m – n) \theta}
+e^{j (-m + n) \theta}
}
d\theta \\
&=
\inv{2} \int_{-\pi}^0
\lr{
\cos( (m + n)\theta )
+\cos( (m – n)\theta )
}
d\theta \\
&=
\inv{2}
\evalrange{
\lr{
\frac{\sin( (m + n)\theta )}{ m + n }
+\frac{\sin( (m – n)\theta )}{ m – n}
}
}{-\pi}{0} \\
&= 0.
\end{aligned}
\end{equation}
References
[1] M. Abramowitz and I.A. Stegun. Handbook of mathematical functions with formulas, graphs, and mathematical tables, volume 55. Dover publications, 1964.
