[Click here for a PDF version of this post]
Scalar equation for a hyperplane.
In our last post, we found, in a round about way, that
Theorem 1.1:
\begin{equation*}
\Bx \cdot \mathbf{\hat{n}} = d.
\end{equation*}
Start proof:
Let \( \beta = \setlr{ \mathbf{\hat{f}}_1, \cdots \mathbf{\hat{f}}_{N-1} } \) be an orthonormal basis for the hyperplane normal to \( \mathbf{\hat{n}} \), and \( \Bd = d \mathbf{\hat{n}} \) be the vector in that hyperplane, closest to the origin, as illustrated in fig. 1.
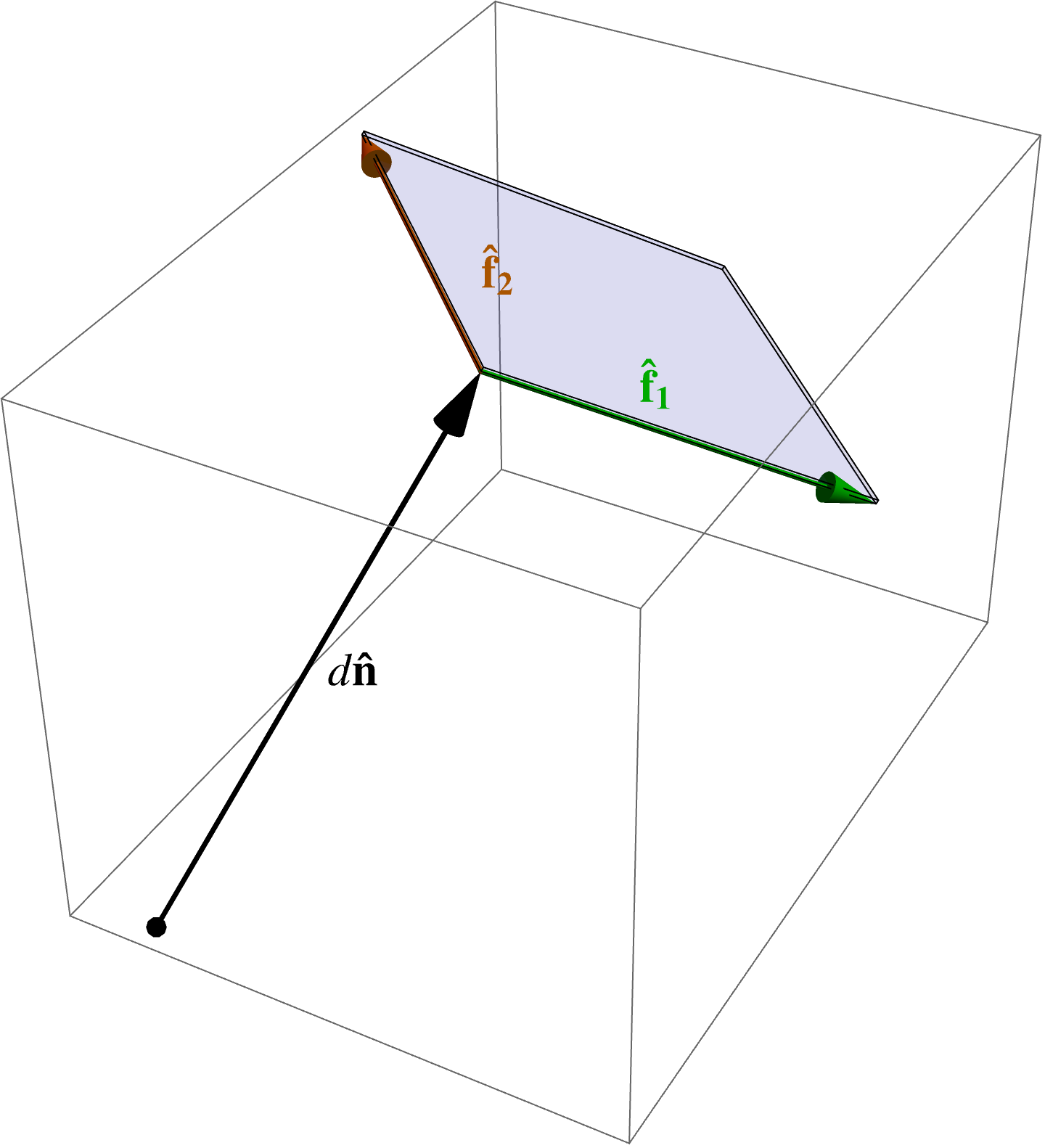
fig 1. R^3 plane with normal n-cap
The hyperplane \( d \) distant from the origin with normal \( \mathbf{\hat{n}} \) has the parametric representation
\begin{equation}\label{eqn:hyperplaneGeometry:40}
\Bx(a_1, \cdots, a_{N-1}) = d \mathbf{\hat{n}} + \sum_{i = 1}^{N-1} a_i \mathbf{\hat{f}}_i.
\end{equation}
Equivalently, suppressing the parameterization, with \( \Bx = \Bx(a_1, \cdots, a_{N-1}) \), representing any vector in that hyperplane, by dotting with \( \mathbf{\hat{n}} \), we have
\begin{equation}\label{eqn:hyperplaneGeometry:60}
\Bx \cdot \mathbf{\hat{n}} = d \mathbf{\hat{n}} \cdot \mathbf{\hat{n}},
\end{equation}
where all the \( \mathbf{\hat{f}}_i \cdot \mathbf{\hat{n}} \) dot products are zero by construction. Since \( \mathbf{\hat{n}} \cdot \mathbf{\hat{n}} = 0 \), the proof is complete.
End proof.
Incidentally, observe we can also write the hyperplane equation in dual form, as
\begin{equation}\label{eqn:hyperplaneGeometry:220}
\Bx \wedge (\mathbf{\hat{n}} I) = d I,
\end{equation}
where \( I \) is an \(\mathbb{R}^N\) pseudoscalar (such as \( I = \mathbf{\hat{n}} \mathbf{\hat{f}}_1 \cdots \mathbf{\hat{f}}_{N-1} \)).
Our previous parallel plane separation problem.
The standard \(\mathbb{R}^3\) scalar form for an equation of a plane is
\begin{equation}\label{eqn:hyperplaneGeometry:80}
a x + b y + c z = d,
\end{equation}
where \( d \) looses it’s geometrical meaning. If we form \( \Bn = (a,b,c) \), then we can rewrite this as
\begin{equation}\label{eqn:hyperplaneGeometry:100}
\Bx \cdot \Bn = d,
\end{equation}
for this representation of an equation of a plane, we see that \( d/\Norm{\Bn} \) is the shortest distance from the origin to the plane. This means that if we have a pair of parallel plane equations
\begin{equation}\label{eqn:hyperplaneGeometry:120}
\begin{aligned}
\Bx \cdot \Bn &= d_1 \\
\Bx \cdot \Bn &= d_2,
\end{aligned}
\end{equation}
then the distance between those planes, by inspection, is
\begin{equation}\label{eqn:hyperplaneGeometry:140}
\Abs{ \frac{d_2}{\Norm{\Bn}} – \frac{d_1}{\Norm{\Bn}} },
\end{equation}
which reduces to just \( \Abs{d_2 – d_1} \) if \( \Bn \) is a unit normal for the plane. In our previous post, the problem to solve was to find the shortest distance between the parallel planes given by
\begin{equation}\label{eqn:hyperplaneGeometry:160}
\begin{aligned}
x – y + 2 z &= -3 \\
3 x – 3 y + 6 z &= 1.
\end{aligned}
\end{equation}
The more natural geometrical form for these plane equations is
\begin{equation}\label{eqn:hyperplaneGeometry:180}
\begin{aligned}
\Bx \cdot \mathbf{\hat{n}} &= -\frac{3}{\sqrt{6}} \\
\Bx \cdot \mathbf{\hat{n}} &= \inv{3 \sqrt{6}},
\end{aligned}
\end{equation}
where \( \mathbf{\hat{n}} = (1,-1,2)/\sqrt{6} \), as illustrated in fig. 2.
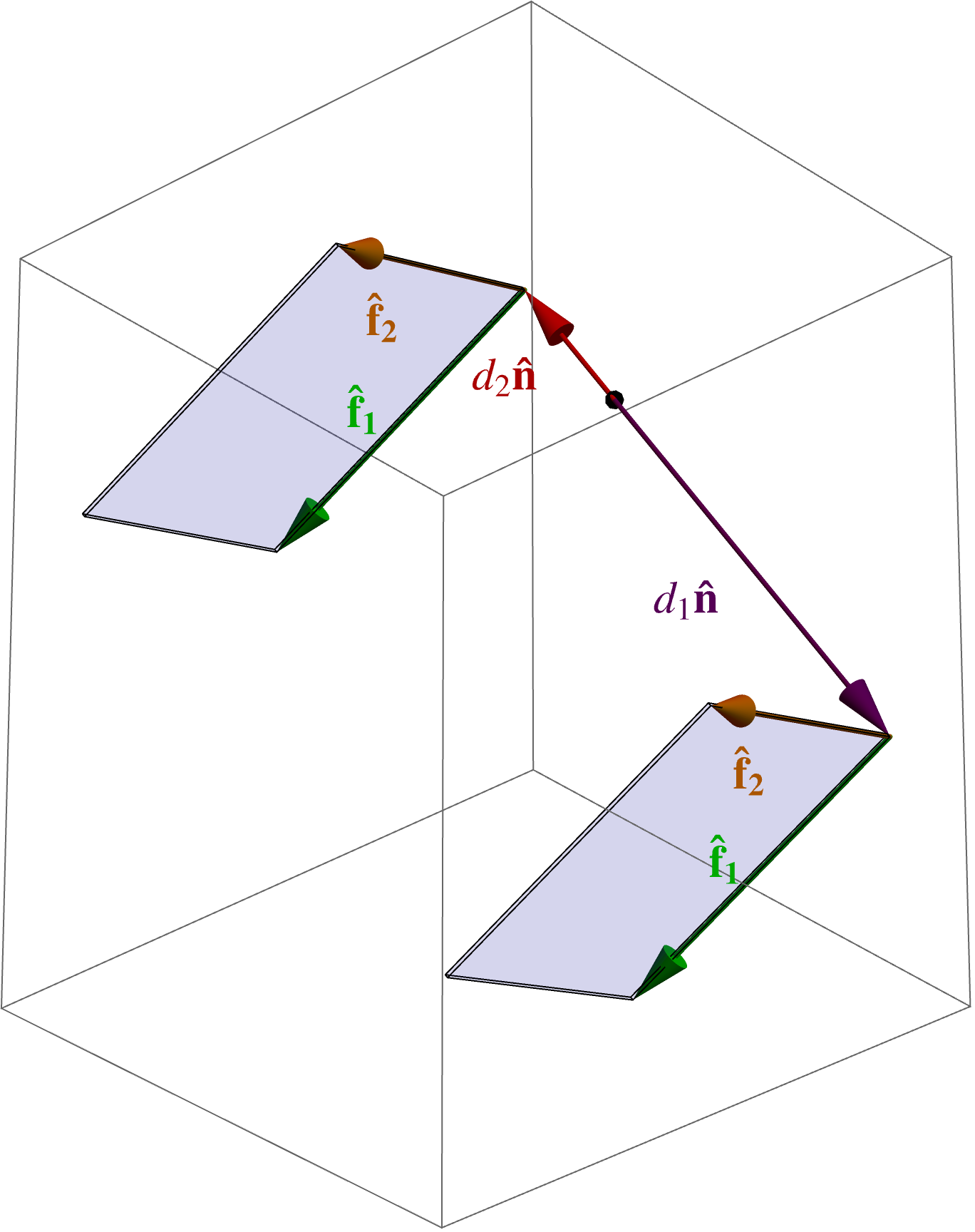
fig. 2. The two planes.
Given that representation, we can find the distance between the planes just by taking the absolute difference of the respective distances to the origin
\begin{equation}\label{eqn:hyperplaneGeometry:200}
\begin{aligned}
\Abs{ -\frac{3}{\sqrt{6}} – \inv{3 \sqrt{6}} }
&= \frac{\sqrt{6}}{6} \lr{ 3 + \inv{3} } \\
&= \frac{10}{18} \sqrt{6} \\
&= \frac{5}{9} \sqrt{6}.
\end{aligned}
\end{equation}