[Click here for a PDF version of this and related posts]
We’ve now evaluated the 1D Green’s function and 2D Green’s function for the wave equation.
For the sake of completeness, now let’s evaluate the Green’s function for the 3D wave equation operator. Again with \( \Br = \Bx – \Bx’, \tau = t – t’ \) we want the \( \epsilon \rightarrow 0 \) limit of
\begin{equation}\label{eqn:waveEquationGreens:1480}
G_\epsilon(\Br, \tau)
=
\inv{\lr{2 \pi}^4} \int d^3 \Bk d\omega \frac{e^{j \Bk \cdot \Br + j \omega \tau}}{(\omega/c – j \epsilon/c)^2 – \Bk^2}.
\end{equation}
For \(\epsilon > 0 \) this will presumably give us the retarded solution, with advanced for \( \epsilon < 0 \). We are using the nice pole displacement that leaves both poles on the same side of the upper or lower half plane, depending on the sign of \( \epsilon \). Let’s only do the \( \epsilon > 0 \) case by hand. Evaluating the \( \omega \) integral first with an upper half plane contour, we have
\begin{equation}\label{eqn:waveEquationGreens:1500}
\begin{aligned}
G_\epsilon(\Br, \tau)
&=
\frac{c^2}{\lr{2 \pi}^4} \int d^3 \Bk e^{j \Bk \cdot \Br}
\frac{e^{j \omega \tau}}{
\lr{\omega – \lr{ j \epsilon – \Abs{\Bk} c}}
\lr{\omega – \lr{ j \epsilon + \Abs{\Bk} c}}
} \\
&=
\frac{j c^2}{\lr{2 \pi}^3} \Theta(\tau) \int d^3 \Bk e^{j \Bk \cdot \Br}
\lr{
\evalbar{\frac{e^{j \omega \tau}}{\omega – \lr{ j \epsilon – \Abs{\Bk} c}}}{\omega = j \epsilon + \Abs{\Bk} c}
+
\evalbar{\frac{e^{j \omega \tau}}{\omega – \lr{ j \epsilon + \Abs{\Bk} c}}}{\omega = j \epsilon – \Abs{\Bk} c}
} \\
&=
\frac{j c^2}{\lr{2 \pi}^3} \Theta(\tau) e^{-\epsilon \tau} \int d^3 \Bk e^{j \Bk \cdot \Br}
\lr{
\frac{e^{j \Abs{\Bk} c \tau}}{2 \Abs{\Bk} c}
–
\frac{e^{-j \Abs{\Bk} c \tau}}{2 \Abs{\Bk} c}
} \\
&=
-\frac{c}{\lr{2 \pi}^3} \Theta(\tau) e^{-\epsilon \tau} \int \frac{d^3 \Bk}{\Abs{\Bk}} e^{j \Bk \cdot \Br}
\sin\lr{ \Abs{\Bk} c \tau }.
\end{aligned}
\end{equation}
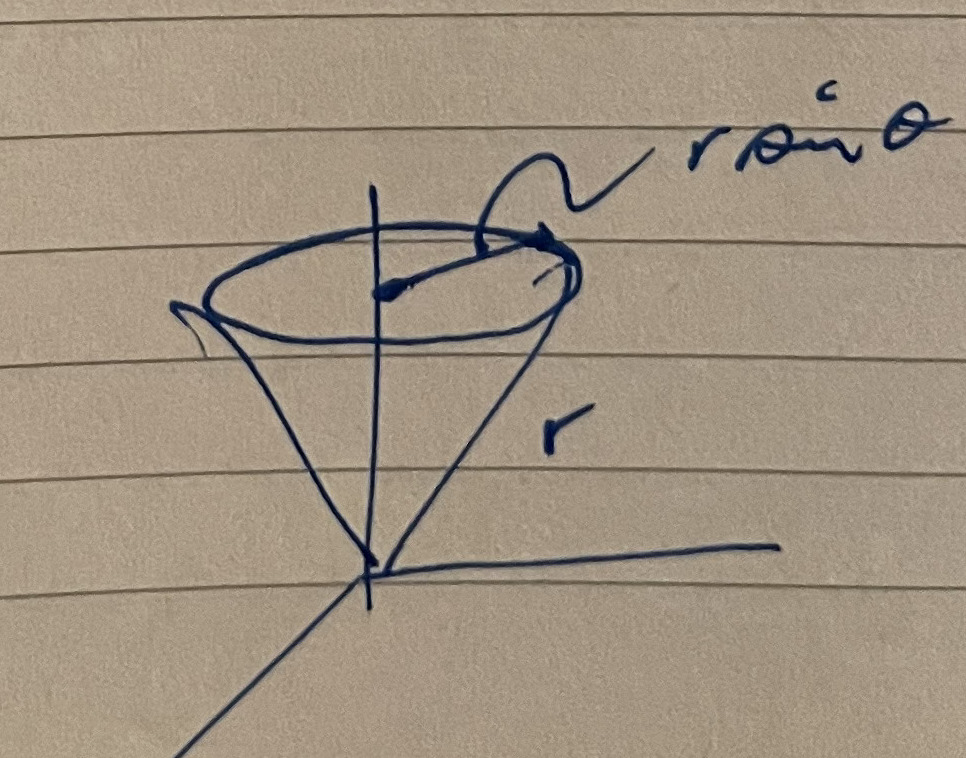
We can evaluate the \( \epsilon \rightarrow 0 \) limit, and switch to spherical coordinates in k-space. Let \( \Br = r \Be_3 \)
\begin{equation}\label{eqn:waveEquationGreens:1520}
G(\Br, \tau)
=
-\frac{c}{\lr{2 \pi}^3} \Theta(\tau)
\int_{k = 0}^\infty \frac{k^2 dk}{k}
\int_{\phi = 0}^{2 \pi} d\phi
\int_{\theta = 0}^{\pi} \sin\theta d\theta
e^{j k r \cos\theta} \sin\lr{ k c \tau }.
\end{equation}
With \( u = \cos\theta \), this gives
\begin{equation}\label{eqn:waveEquationGreens:1540}
\begin{aligned}
G(\Br, \tau)
&=
\frac{c}{\lr{2 \pi}^2} \Theta(\tau)
\int_{k = 0}^\infty k dk \sin\lr{ k c \tau }
\int_{u = -1}^{1} du
e^{j k r u} \\
&=
\frac{c}{\lr{2 \pi}^2} \Theta(\tau)
\int_{k = 0}^\infty k dk \sin\lr{ k c \tau }
\lr{ \frac{e^{-j k r }}{j k r} – \frac{e^{j k r }}{j k r} } \\
&=
-\frac{c}{2 \pi^2 r} \Theta(\tau) \int_{k = 0}^\infty dk \sin\lr{ k c \tau } \sin\lr{ k r} \\
&=
-\frac{c}{4 \pi^2 r} \Theta(\tau) \int_{k = 0}^\infty dk
\lr{
\cos\lr{ k( c \tau – r ) }
–
\cos\lr{ k( c \tau + r ) }
} \\
&=
-\frac{c}{8 \pi^2 r} \Theta(\tau) \int_{k = -\infty}^\infty dk
\lr{
\cos\lr{ k( c \tau – r ) }
–
\cos\lr{ k( c \tau + r ) }
} \\
&=
-\frac{c}{8 \pi^2 r} \Theta(\tau) \int_{-\infty}^\infty dk
\lr{
e^{ j k( c \tau – r ) } – e^{ j k( c \tau + r ) }
} \\
&=
-\frac{c}{4 \pi r} \Theta(\tau)
\lr{
\delta( c \tau – r )
–
\delta( c \tau + r )
} \\
&=
-\frac{1}{4 \pi r} \Theta(\tau)
\lr{
\delta( \tau – r/c )
–
\delta( \tau + r/c )
}.
\end{aligned}
\end{equation}
Observe that the second delta function only has a value when \( \tau = -r/c \), but \( \Theta(-r/c) = 0 \). Similarly, the first delta function only has a value for \( \tau = r/c \ge 0 \), where the Heaviside step function is unity. That means we can simplify this to just
\begin{equation}\label{eqn:waveEquationGreens:1560}
\boxed{
G(\Br, \tau) = -\frac{1}{4 \pi \Abs{\Br}} \delta( \tau – \Abs{\Br}/c ),
}
\end{equation}
as expected.
Again, sort of sadly, we can skip all the fun and evaluate most of this in Mathematica. It needs only minor hand-holding to extract the delta function semantics. The retarded derivation is shown in fig. 1, and the advanced derivation in fig. 2.

fig. 1. Retarded 3D Green’s function for the wave equation.

fig. 2. Advanced 3D Green’s function for the wave equation.