[Click here for a PDF of this post with nicer formatting and figures] or [Click here for my notes compilation for this class]
Disclaimer
Peeter’s lecture notes from class. These may be incoherent and rough.
These are notes for the UofT course ECE1236H, Microwave and Millimeter-Wave
Techniques, taught by Prof. G.V. Eleftheriades, covering [1] chap. 2 content.
Requirements
A transmission line requires two conductors as sketched in fig. 1, which shows a 2-wire line such a telephone line, a coaxial cable as found in cable TV distribution, and a microstrip line as found in cell phone RF interconnects.
../../figures/ece1236/deck4TxlineFig1: fig. 1. Transmission line examples.
A two-wire line becomes a transmission line when the wavelength of operation becomes comparable to the size of the line (or higher spectral component for pulses). In general a transmission line much support (TEM) transverse electromagnetic modes.
Time harmonic solutions on transmission lines
In fig. 2, an electronic representation of a transmission line circuit is sketched.
../../figures/ece1236/deck4TxlineFig2: fig. 2. Transmission line equivalent circuit.
In this circuit all the elements have per-unit length units. With \( I = C dV/dt \sim j \omega C V \), \( v = I R \), and \( V = L dI/dt \sim j \omega L I \), the KVL equation is
\begin{equation}\label{eqn:uwaves4TransmissionLines:20}
V(z) – V(z + \Delta z) = I(z) \Delta z \lr{ R + j \omega L },
\end{equation}
or in the \( \Delta z \rightarrow 0 \) limit
\begin{equation}\label{eqn:uwaves4TransmissionLines:40}
\PD{z}{V} = -I(z) \lr{ R + j \omega L }.
\end{equation}
The KCL equation at the interior node is
\begin{equation}\label{eqn:uwaves4TransmissionLines:60}
-I(z) + I(z + \Delta z) + \lr{ j \omega C + G} V(z + \Delta z) = 0,
\end{equation}
or
\begin{equation}\label{eqn:uwaves4TransmissionLines:80}
\PD{z}{I} = -V(z) \lr{ j \omega C + G}.
\end{equation}
This pair of equations is known as the telegrapher’s equations
\begin{equation}\label{eqn:uwaves4TransmissionLines:100}
\boxed{
\begin{aligned}
\PD{z}{V} &= -I(z) \lr{ R + j \omega L } \\
\PD{z}{I} &= -V(z) \lr{ j \omega C + G}.
\end{aligned}
}
\end{equation}
The second derivatives are
\begin{equation}\label{eqn:uwaves4TransmissionLines:120}
\begin{aligned}
\PDSq{z}{V} &= -\PD{z}{I} \lr{ R + j \omega L } \\
\PDSq{z}{I} &= -\PD{z}{V} \lr{ j \omega C + G},
\end{aligned}
\end{equation}
which allow the \( V, I \) to be decoupled
\begin{equation}\label{eqn:uwaves4TransmissionLines:140}
\boxed{
\begin{aligned}
\PDSq{z}{V} &= V(z) \lr{ j \omega C + G} \lr{ R + j \omega L } \\
\PDSq{z}{I} &= I(z) \lr{ R + j \omega L } \lr{ j \omega C + G},
\end{aligned}
}
\end{equation}
With a complex propagation constant
\begin{equation}\label{eqn:uwaves4TransmissionLines:160}
\begin{aligned}
\gamma
&= \alpha + j \beta \\
&= \sqrt{ \lr{ j \omega C + G} \lr{ R + j \omega L } } \\
&=
\sqrt{ R G – \omega^2 L C + j \omega ( L G + R C ) },
\end{aligned}
\end{equation}
the decouple equations have the structure of a wave equation for a lossy line in the frequency domain
\begin{equation}\label{eqn:uwaves4TransmissionLines:180}
\boxed{
\begin{aligned}
\PDSq{z}{V} – \gamma^2 V &= 0 \\
\PDSq{z}{I} – \gamma^2 I &= 0.
\end{aligned}
}
\end{equation}
We write the solutions to these equations as
\begin{equation}\label{eqn:uwaves4TransmissionLines:200}
\begin{aligned}
V(z) &= V_0^{+} e^{-\gamma z} + V_0^{-} e^{+\gamma z} \\
I(z) &= I_0^{+} e^{-\gamma z} – I_0^{-} e^{+\gamma z} \\
\end{aligned}
\end{equation}
Only one of \( V \) or \( I \) is required since they are dependent through \ref{eqn:uwaves4TransmissionLines:100}, as can be seen by taking derivatives
\begin{equation}\label{eqn:uwaves4TransmissionLines:220}
\begin{aligned}
\PD{z}{V}
&= \gamma \lr{ -V_0^{+} e^{-\gamma z} + V_0^{-} e^{+\gamma z} } \\
&=
-I(z) \lr{ R + j \omega L },
\end{aligned}
\end{equation}
so
\begin{equation}\label{eqn:uwaves4TransmissionLines:240}
I(z)
=
\frac{\gamma}{ R + j \omega L } \lr{ V_0^{+} e^{-\gamma z} – V_0^{-} e^{+\gamma z} }.
\end{equation}
Introducing the characteristic impedance \( Z_0 \) of the line
\begin{equation}\label{eqn:uwaves4TransmissionLines:260}
\begin{aligned}
Z_0
&= \frac{R + j \omega L}{\gamma} \\
&= \sqrt{ \frac{R + j \omega L}{G + j \omega C} },
\end{aligned}
\end{equation}
we have
\begin{equation}\label{eqn:uwaves4TransmissionLines:280}
\begin{aligned}
I(z)
&=
\inv{Z_0} \lr{ V_0^{+} e^{-\gamma z} – V_0^{-} e^{+\gamma z} } \\
&=
I_0^{+} e^{-\gamma z} – I_0^{-} e^{+\gamma z},
\end{aligned}
\end{equation}
where
\begin{equation}\label{eqn:uwaves4TransmissionLines:300}
\begin{aligned}
I_0^{+} &= \frac{V_0^{+}}{Z_0} \\
I_0^{-} &= \frac{V_0^{-}}{Z_0}.
\end{aligned}
\end{equation}
Mapping TL geometry to per unit length \( C \) and \( L \) elements
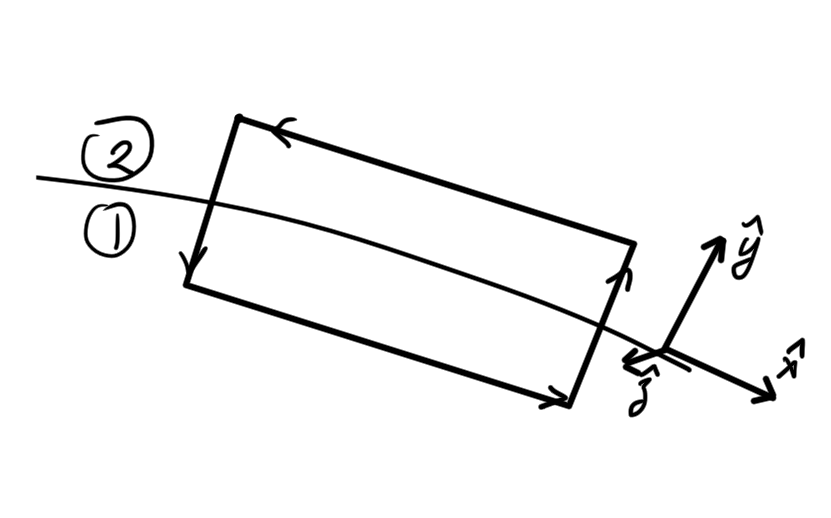
From electrostatics and magnetostatics the per unit length induction and capacitance constants for a co-axial cable can be calculated. For the cylindrical configuration sketched in fig. 3
../../figures/ece1236/deck4TxlineFig3: fig. 3. Coaxial cable.
From Gauss’ law the total charge can be calculated assuming that the ends of the cable can be neglected
\begin{equation}\label{eqn:uwaves4TransmissionLines:520}
\begin{aligned}
Q
&= \int \spacegrad \cdot \BD dV \\
&= \oint \BD \cdot d\BA \\
&= \epsilon_0 \epsilon_r E ( 2 \pi r ) l,
\end{aligned}
\end{equation}
This provides the radial electric field magnitude, in terms of the total charge
\begin{equation}\label{eqn:uwaves4TransmissionLines:320}
E =
\frac{Q/l}{\epsilon_0 \epsilon_r ( 2 \pi r ) },
\end{equation}
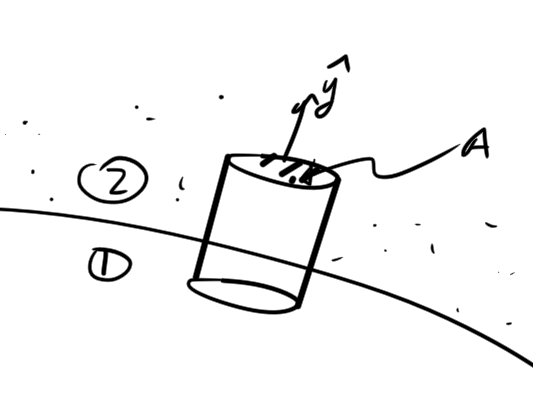
which must be a radial field as sketched in fig. 4.
../../figures/ece1236/deck4TxlineFig4: fig. 4. Radial electric field for coaxial cable.
The potential difference from the inner transmission surface to the outer is
\begin{equation}\label{eqn:uwaves4TransmissionLines:340}
\begin{aligned}
V
&= \int_a^b E dr \\
&=
\frac{Q/l}{2 \pi \epsilon_0 \epsilon_r }
\int_a^b \frac{dr}{r} \\
&=
\frac{Q/l}{2 \pi \epsilon_0 \epsilon_r } \ln \frac{b}{a}.
\end{aligned}
\end{equation}
Therefore the capacitance per unit length is
\begin{equation}\label{eqn:uwaves4TransmissionLines:360}
C = \frac{Q/l}{V} = \frac{2 \pi \epsilon_0 \epsilon_r }{ \ln \frac{b}{a} } .
\end{equation}
The inductance per unit length can be calculated form Ampere’s law
\begin{equation}\label{eqn:uwaves4TransmissionLines:380}
\begin{aligned}
\int \lr{ \spacegrad \cross \BH } \cdot d\BS
&=
\int \BJ \cdot d\BS + \PD{t}{} \int \BD \cdot d\Bl \\
&=
\int \BJ \cdot d\BS \\
&=
I \\
&=
\oint \BH \cdot d\Bl \\
&=
H ( 2 \pi r ) \\
&=
\frac{B}{\mu_0} ( 2 \pi r )
\end{aligned}
\end{equation}
The flux is
\begin{equation}\label{eqn:uwaves4TransmissionLines:400}
\begin{aligned}
\Phi
&= \int \BB \cdot d\BA \\
&= \frac{\mu_0 I}{ 2 \pi } \int_A \inv{r} d dr \\
&= \frac{\mu_0 I}{ 2 \pi } \int_a^b \inv{r} l d dr \\
&= \frac{\mu_0 I l}{ 2 \pi } \ln \frac{b}{a}.
\end{aligned}
\end{equation}
The inductance per unit length is
\begin{equation}\label{eqn:uwaves4TransmissionLines:420}
L = \frac{\Phi/l}{I} = \frac{\mu_0}{ 2 \pi } \ln \frac{b}{a}.
\end{equation}
For a lossless line where \( R = G = 0 \), we have \( \gamma = \sqrt{ (j \omega L)(j \omega C)} = j \omega \sqrt{L C} \),
so the phase velocity for a (lossless) coaxial cable is
\begin{equation}\label{eqn:uwaves4TransmissionLines:440}
\begin{aligned}
v_\phi
&= \frac{\omega}{\beta} \\
&= \frac{\omega}{\textrm{Im}(\gamma)} \\
&= \frac{\omega}{\omega \sqrt{LC})} \\
&= \frac{1}{\sqrt{LC})}.
\end{aligned}
\end{equation}
This gives
\begin{equation}\label{eqn:uwaves4TransmissionLines:460}
\begin{aligned}
v_\phi^2
&= \inv{ L } \inv{C} \\
&=
\frac{ 2 \pi }{ \mu_0 \ln \frac{b}{a} }
\frac
{\ln \frac{b}{a}}
{2 \pi \epsilon_0 \epsilon_r } \\
&=
\frac{1 }{ \mu_0 \epsilon_0 \epsilon_r } \\
&=
\frac{1 }{ \mu_0 \epsilon }.
\end{aligned}
\end{equation}
So
\begin{equation}\label{eqn:uwaves4TransmissionLines:480}
v_\phi = \inv{\sqrt{\epsilon \mu_0}},
\end{equation}
which is the speed of light in the medium (\(\epsilon_r\)) that fills the co-axial cable.
This is \underline{not} a coincidence. In any two-wire homogeneously filled transmission line, the phase velocity is equal to the speed of light in the unbounded medium that fills the line.
The characteristic impedance (again assuming the lossless \( R = G = 0 \) case) is
\begin{equation}\label{eqn:uwaves4TransmissionLines:500}
\begin{aligned}
Z_0
&= \sqrt{ \frac{R + j \omega L}{G + j \omega C} } \\
&= \sqrt{ \frac{j \omega L}{j \omega C} } \\
&= \sqrt{ \frac{L}{C} } \\
&= \sqrt{
\frac{\mu_0}{ 2 \pi } \ln \frac{b}{a}
\frac{ \ln \frac{b}{a} }{2 \pi \epsilon_0 \epsilon_r }
} \\
&=
\sqrt{ \frac{\mu_0}{\epsilon} } \frac{ \ln \frac{b}{a} }{ 2 \pi }.
\end{aligned}
\end{equation}
Note that \( \eta = \sqrt{\mu_0/\epsilon_0} = 120 \pi \Omega \) is the intrinsic impedance of free space. The values \( a, b \) in \ref{eqn:uwaves4TransmissionLines:500} can be used to tune the characteristic impedance of the transmission line.
Lossless line.
The lossless lossless case where \( R = G = 0 \) was considered above. The results were
\begin{equation}\label{eqn:uwaves4TransmissionLines:540}
\gamma = j \omega \sqrt{ L C },
\end{equation}
so \( \alpha = 0 \) and \( \beta = \omega \sqrt{LC} \), and the phase velocity was
\begin{equation}\label{eqn:uwaves4TransmissionLines:560}
v_\phi = \inv{\sqrt{LC}},
\end{equation}
the characteristic impedance is
\begin{equation}\label{eqn:uwaves4TransmissionLines:580}
Z_0 = \sqrt{\frac{L}{C}},
\end{equation}
and the signals are
\begin{equation}\label{eqn:uwaves4TransmissionLines:600}
\begin{aligned}
V(z) &= V_0^{+} e^{-j \beta z} + V_0^{-} e^{j \beta z} \\
I(z) &= \inv{Z_0} \lr{ V_0^{+} e^{-j \beta z} – V_0^{-} e^{j \beta z} }
\end{aligned}
\end{equation}
In the time domain for an infinite line, we have
\begin{equation}\label{eqn:uwaves4TransmissionLines:620}
\begin{aligned}
v(z, t)
&= \textrm{Re}\lr{ V(z) e^{j \omega t} } \\
&= V_0^{+} \textrm{Re}\lr{ e^{-j \beta z} e^{j \omega t} } \\
&= V_0^{+} \cos( \omega t – \beta z ).
\end{aligned}
\end{equation}
In this case the shape and amplitude of the waveform are preserved as sketched in fig. 7.
../../figures/ece1236/deck4TxlineFig7: fig. 7. Lossless line signal preservation.
Low loss line.
Assume \( R \ll \omega L \) and \( G \ll \omega C \). In this case we have
\begin{equation}\label{eqn:uwaves4TransmissionLines:640}
\begin{aligned}
\gamma
&= \sqrt{ (R + j \omega L) ( G + j \omega C ) } \\
&=
j \omega \sqrt{L C} \sqrt{
\lr{ 1 + \frac{R}{j\omega L} }
\lr{ 1 + \frac{G}{j\omega C} }
} \\
&\approx
j \omega \sqrt{L C}
\lr{ 1 + \frac{R}{2 j\omega L} }
\lr{ 1 + \frac{G}{2 j\omega C} } \\
&\approx
j \omega \sqrt{L C}
\lr{ 1 + \frac{R}{2 j\omega L} + \frac{G}{2 j\omega C} } \\
&=
j \omega \sqrt{L C}
+ j \omega \frac{R \sqrt{C/L}}{2 j\omega}
+ j \omega \frac{G \sqrt{L/C}}{2 j\omega} \\
&=
j \omega \sqrt{L C}
+
\inv{2} \lr{
R \sqrt{\frac{C}{L}}
+
G \sqrt{\frac{L}{C}}
},
\end{aligned}
\end{equation}
so
\begin{equation}\label{eqn:uwaves4TransmissionLines:660}
\begin{aligned}
\alpha &=
\inv{2} \lr{
R \sqrt{\frac{C}{L}}
+
G \sqrt{\frac{L}{C}}
} \\
\beta &= \omega \sqrt{L C}.
\end{aligned}
\end{equation}
Observe that this value for \( \beta \) is the same as the lossless case to first order. We also have
\begin{equation}\label{eqn:uwaves4TransmissionLines:680}
Z_0
= \sqrt{ \frac{R + j \omega L}{G + j \omega C} }
\approx
\sqrt{ \frac{L}{C} },
\end{equation}
also the same as the lossless case. We must also have \( v_\phi = 1/\sqrt{L C} \). To consider a time domain signal note that
\begin{equation}\label{eqn:uwaves4TransmissionLines:700}
\begin{aligned}
V(z)
&= V_0^{+} e^{-\gamma z} \\
&= V_0^{+} e^{-\alpha z} e^{-j \beta z},
\end{aligned}
\end{equation}
so
\begin{equation}\label{eqn:uwaves4TransmissionLines:720}
\begin{aligned}
v(z, t)
&= \textrm{Re} \lr{ V(z) e^{j \omega t} } \\
&= \textrm{Re} \lr{ V_0^{+} e^{-\alpha z} e^{-j \beta z} e^{j \omega t} } \\
&= V_0^{+} e^{-\alpha z} \cos( \omega t – \beta z ).
\end{aligned}
\end{equation}
The phase factor can be written
\begin{equation}\label{eqn:uwaves4TransmissionLines:740}
\omega t – \beta z
=
\omega \lr{ t – \frac{\beta}{\omega} z }
\omega \lr{ t – z/v_\phi },
\end{equation}
so the signal still moves with the phase velocity \( v_\phi = 1/\sqrt{LC} \), but in a diminishing envelope as sketched in fig. 8.
../../figures/ece1236/deck4TxlineFig8: fig. 8. Time domain envelope for loss loss line.
Notes
- The shape is preserved but the amplitude has an exponential attenuation along the line.
- In this case, since \( \beta(\omega) \) is a linear function to first order, we have no dispersion. All of the Fourier components of a pulse travel with the same phase velocity since \( v_\phi = \omega/\beta \) is constant. i.e. \( v(z, t) = e^{-\alpha z} f( t – z/v_\phi ) \). We should expect dispersion when the \( R/\omega L \) and \( G/\omega C \) start becoming more significant.
Distortionless line.
Motivated by the early telegraphy days, when low loss materials were not available. Therefore lines with a constant attenuation and constant phase velocity (i.e. no dispersion) were required in order to eliminate distortion of the signals. This can be achieved by setting
\begin{equation}\label{eqn:uwaves4TransmissionLines:760}
\frac{R}{L} = \frac{G}{C}.
\end{equation}
When that is done we have
\begin{equation}\label{eqn:uwaves4TransmissionLines:780}
\begin{aligned}
\gamma
&= \sqrt{ (R + j \omega L) ( G + j \omega C ) } \\
&= j \omega \sqrt{L C} \sqrt{
\lr{ 1 + \frac{R}{j \omega L} }
\lr{ 1 + \frac{G}{j \omega C} }
} \\
&= j \omega \sqrt{L C} \sqrt{
\lr{ 1 + \frac{R}{j \omega L} }
\lr{ 1 + \frac{R}{j \omega L} }
} \\
&= j \omega \sqrt{L C}
\lr{ 1 + \frac{R}{j \omega L} } \\
&= R \sqrt{\frac{C}{L} }
+ j \omega \sqrt{L C} \\
&= \sqrt{R G }
+ j \omega \sqrt{L C}.
\end{aligned}
\end{equation}
We have
\begin{equation}\label{eqn:uwaves4TransmissionLines:800}
\begin{aligned}
\alpha &= \sqrt{R G } \\
\beta &= \omega \sqrt{L C}.
\end{aligned}
\end{equation}
The phase velocity is the same as that of the lossless and low-loss lines
\begin{equation}\label{eqn:uwaves4TransmissionLines:820}
v_\phi = \frac{\omega}{\beta} = \inv{\sqrt{L C}}.
\end{equation}
Terminated lossless line.
Consider the load configuration sketched in fig. 9.
../../figures/ece1236/deck4TxlineFig9: fig. 9. Terminated line.
Recall that
\begin{equation}\label{eqn:uwaves4TransmissionLines:840}
\begin{aligned}
V(z) &= V_0^{+} e^{-j \beta z} + V_0^{-} e^{+j \beta z} \\
I(z) &= \frac{V_0^{+}}{Z_0} e^{-j \beta z} – \frac{V_0^{-}}{Z_0} e^{+j \beta z} \\
\end{aligned}
\end{equation}
At the load (\( z = 0 \)), we have
\begin{equation}\label{eqn:uwaves4TransmissionLines:860}
\begin{aligned}
V(0) &= V_0^{+} + V_0^{-} \\
I(0) &= \inv{Z_0} \lr{ V_0^{+} – V_0^{-} }
\end{aligned}
\end{equation}
So
\begin{equation}\label{eqn:uwaves4TransmissionLines:880}
\begin{aligned}
Z_{\textrm{L}}
&= \frac{V(0)}{I(0)} \\
&= Z_0 \frac{ V_0^{+} + V_0^{-} }{ V_0^{+} – V_0^{-} } \\
&= Z_0 \frac{ 1 + \Gamma_{\textrm{L}} }{1 – \Gamma_{\textrm{L}} },
\end{aligned}
\end{equation}
where
\begin{equation}\label{eqn:uwaves4TransmissionLines:900}
\Gamma_{\textrm{L}} \equiv \frac{V_0^{-} }{V_0^{+}},
\end{equation}
is the reflection coefficient at the load.
The phasors for the signals take the form
\begin{equation}\label{eqn:uwaves4TransmissionLines:920}
\begin{aligned}
V(z) &= V_0^{+} \lr{ e^{-j \beta z} + \Gamma_{\textrm{L}} e^{+j \beta z} } \\
I(z) &= \frac{V_0^{+}}{Z_0} \lr{ e^{-j \beta z} – \Gamma_{\textrm{L}} e^{+j \beta z} }.
\end{aligned}
\end{equation}
Observe that we can rearranging for \( \Gamma_{\textrm{L}} \) in terms of the impedances
\begin{equation}\label{eqn:uwaves4TransmissionLines:940}
\lr{ 1 – \Gamma_{\textrm{L}} } Z_{\textrm{L}} = Z_0 \frac{ 1 + \Gamma_{\textrm{L}} },
\end{equation}
or
\begin{equation}\label{eqn:uwaves4TransmissionLines:960}
\Gamma_{\textrm{L}} \lr{ Z_0 + Z_{\textrm{L}} } = Z_{\textrm{L}} – Z_0,
\end{equation}
or
\begin{equation}\label{eqn:uwaves4TransmissionLines:980}
\Gamma_{\textrm{L}}
= \frac{Z_{\textrm{L}} – Z_0}
{ Z_0 + Z_{\textrm{L}} } .
\end{equation}
Power
The average (time) power on the line is
\begin{equation}\label{eqn:uwaves4TransmissionLines:1000}
\begin{aligned}
P_{ \textrm{av}}
&= \inv{2} \textrm{Re}\lr{ V(Z) I^\conj(z) } \\
&=
\inv{2} \textrm{Re}
\lr{
V_0^{+} \lr{ e^{-j \beta z} + \Gamma_{\textrm{L}} e^{+j \beta z} }
\lr{\frac{V_0^{+}}{Z_0}}^\conj \lr{ e^{j \beta z} – \Gamma_{\textrm{L}}^\conj e^{-j \beta z} }
} \\
&= \frac{ \Abs{V_0^{+}}^2 }{2 Z_0 } \textrm{Re}\lr{
1 + \Gamma_{\textrm{L}} e^{2 j \beta z} – \Gamma_{\textrm{L}}^\conj e^{-2 j \beta z} – \Abs{\Gamma_{\textrm{L}}}^2
} \\
&= \frac{ \Abs{V_0^{+}}^2 }{2 Z_0 } \lr{
1 – \Abs{\Gamma_{\textrm{L}}}^2
}.
\end{aligned}
\end{equation}
where we’ve made use of the fact that \( Z_0 = \sqrt{L/C} \) is real for the lossless line, and the fact that a conjugate difference \( A – A^\conj = 2 j \textrm{Im}(A) \) is purely imaginary.
This can be written as
\begin{equation}\label{eqn:uwaves4TransmissionLines:1020}
P_{ \textrm{av}} = P^{+} – P^{-},
\end{equation}
where
\begin{equation}\label{eqn:uwaves4TransmissionLines:1040}
\begin{aligned}
P^{+} &= \frac{ \Abs{V_0^{+}}^2 }{2 Z_0 } \\
P^{+} &= \frac{ \Abs{V_0^{+}}^2 }{2 Z_0 } \Abs{\Gamma_{\textrm{L}}}^2.
\end{aligned}
\end{equation}
This difference is the power delivered to the load. This is not z-dependent because we are considering the lossless case. Maximum power is delivered to the load when \( \Gamma_{\textrm{L}} = 0 \), which occurs when the impedances are matched.
Return loss and insertion loss. Defined.
Return loss (dB) is defined as
\begin{equation}\label{eqn:uwaves4TransmissionLines:1060}
\begin{aligned}
\textrm{RL}
&= 10 \log_{10} \frac{P_{\textrm{inc}}}{P_{\textrm{refl}}} \\
&= 10 \log_{10} \inv{\Abs{\Gamma}^2} \\
&= -20 \log_{10} \Abs{\Gamma}.
\end{aligned}
\end{equation}
Insertion loss (dB) is defined as
\begin{equation}\label{eqn:uwaves4TransmissionLines:1080}
\begin{aligned}
\textrm{IL}
&= 10 \log_{10} \frac{P_{\textrm{inc}}}{P_{\textrm{trans}}} \\
&= 10 \log_{10} \frac{P^{+}}{P^{+} – P^{-}} \\
&= 10 \log_{10} \inv{1 – \Abs{\Gamma}^2} \\
&= -10 \log_{10} \lr{ 1 – \Abs{\Gamma}^2 }.
\end{aligned}
\end{equation}
Standing wave ratio
Consider again the lossless loaded configuration of fig. 9. Now let \( z = – l \), where \( l \) is the distance from the load. The phasors at this point on the line are
\begin{equation}\label{eqn:uwaves4TransmissionLines:1100}
\begin{aligned}
V(-l) &= V_0^{+} \lr{ e^{j \beta l} + \Gamma_{\textrm{L}} e^{-j \beta l} } \\
I(-l) &= \frac{V_0^{+}}{Z_0} \lr{ e^{j \beta l} – \Gamma_{\textrm{L}} e^{-j \beta l} } \\
\end{aligned}
\end{equation}
The absolute voltage at this point is
\begin{equation}\label{eqn:uwaves4TransmissionLines:1120}
\begin{aligned}
\Abs{V(-l)}
&= \Abs{V_0^{+}} \Abs{ e^{j \beta l} + \Gamma_{\textrm{L}} e^{-j \beta l} } \\
&= \Abs{V_0^{+}} \Abs{ 1 + \Gamma_{\textrm{L}} e^{-2 j \beta l} } \\
&= \Abs{V_0^{+}} \Abs{ 1 + \Abs{\Gamma_{\textrm{L}}} e^{j \Theta_{\textrm{L}}} e^{-2 j \beta l} },
\end{aligned}
\end{equation}
where the complex valued \( \Gamma_{\textrm{L}} \) is given by \( \Gamma_{\textrm{L}} = \Abs{\Gamma_{\textrm{L}}} e^{j \Theta_{\textrm{L}}} \).
This gives
\begin{equation}\label{eqn:uwaves4TransmissionLines:1140}
\Abs{V(-l)}
= \Abs{V_0^{+}} \Abs{ 1 + \Abs{\Gamma_{\textrm{L}}} e^{j(\Theta_{\textrm{L}} -2 \beta l)} }.
\end{equation}
The voltage magnitude oscillates as one moves along the line. The maximum occurs when \( e^{j (\Theta_{\textrm{L}} -2 \beta l)} = 1 \)
\begin{equation}\label{eqn:uwaves4TransmissionLines:1160}
V_{\mathrm{max}} = \Abs{V_0^{+}} \Abs{ 1 + \Abs{\Gamma_{\textrm{L}}} }.
\end{equation}
This occurs when \( \Theta_{\textrm{L}} – 2 \beta l = 2 k \pi \) for \( k = 0, 1, 2, \cdots \). The minimum occurs when \( e^{j (\Theta_{\textrm{L}} -2 \beta l)} = -1 \)
\begin{equation}\label{eqn:uwaves4TransmissionLines:1180}
V_{\mathrm{min}} = \Abs{V_0^{+}} \Abs{ 1 – \Abs{\Gamma_{\textrm{L}}} },
\end{equation}
which occurs when \( \Theta_{\textrm{L}} – 2 \beta l = (2 k – 1 )\pi \) for \( k = 1, 2, \cdots \). The standing wave ratio is defined as
\begin{equation}\label{eqn:uwaves4TransmissionLines:1200}
\textrm{SWR} = \frac{V_{\mathrm{max}}}{V_{\mathrm{min}}} = \frac{ 1 + \Abs{\Gamma_{\textrm{L}}} }{ 1 – \Abs{\Gamma_{\textrm{L}}} }.
\end{equation}
This is a measure of the mismatch of a line. This is sketched in fig. 10.
../../figures/ece1236/deck4TxlineFig10: fig. 10. SWR extremes.
Notes:
- Since \( 0 \le \Abs{\Gamma_{\textrm{L}}} \le 1 \), we have \( 1 \le \textrm{SWR} \le \infty \). The lower bound is for a matched line, and open, short, or purely reactive termination leads to the infinities.
- The distance between two successive maxima (or minima) can be determined by setting \( \Theta_{\textrm{L}} – 2 \beta l = 2 k \pi \) for two consecutive values of \( k \). For \( k = 0 \), suppose that \( V_{\mathrm{max}} \) occurs at \( d_1 \)
\begin{equation}\label{eqn:uwaves4TransmissionLines:1220}
\Theta_{\textrm{L}} – 2 \beta d_1 = 2 (0) \pi,
\end{equation}
or
\begin{equation}\label{eqn:uwaves4TransmissionLines:1240}
d_1 = \frac{\Theta_{\textrm{L}}}{2 \beta}.
\end{equation}
For \( k = 1 \), let the max occur at \( d_2 \)
\begin{equation}\label{eqn:uwaves4TransmissionLines:1260}
\Theta_{\textrm{L}} – 2 \beta d_2 = 2 (1) \pi,
\end{equation}
or
\begin{equation}\label{eqn:uwaves4TransmissionLines:1280}
d_2 = \frac{\Theta_{\textrm{L}} – 2 \pi}{2 \beta}.
\end{equation}
The difference is
\begin{equation}\label{eqn:uwaves4TransmissionLines:1300}
\begin{aligned}
d_1 – d_2
&= \frac{\Theta_{\textrm{L}}}{2 \beta} – \frac{\Theta_{\textrm{L}} – 2 \pi}{2 \beta} \\
&= \frac{\pi}{\beta} \\
&= \frac{\pi}{2 \pi/\lambda} \\
&= \frac{\lambda}{2}.
\end{aligned}
\end{equation}
The distance between two consecutive maxima (or minima) of the SWR is \( \lambda/2 \).
Impedance Transformation.
Referring to fig. 11, let’s solve for the impedance at the load where \( z = 0 \) and at \( z = -l \).
../../figures/ece1236/deck4TxlineFig11: fig. 11. Configuration for impedance transformation.
At any point on the line we have
\begin{equation}\label{eqn:uwaves4TransmissionLinesCore:1320}
V(z) = V_0^{+} e^{-j \beta z} \lr{ 1 + \Gamma_{\textrm{L}} e^{2 j \beta z} },
\end{equation}
so at the load and input we have
\begin{equation}\label{eqn:uwaves4TransmissionLinesCore:1340}
\begin{aligned}
V_{\textrm{L}} &= V_0^{+} \lr{ 1 + \Gamma_{\textrm{L}} } \\
V(-l) &= V^{+} \lr{ 1 + \Gamma_{\textrm{L}}(-1) },
\end{aligned}
\end{equation}
where
\begin{equation}\label{eqn:uwaves4TransmissionLinesCore:1360}
\begin{aligned}
V^{+} &= V_0^{+} e^{ j \beta l } \\
\Gamma_{\textrm{L}}(-1) &= \Gamma_{\textrm{L}} e^{-2 j \beta l}
\end{aligned}
\end{equation}
Similarly
\begin{equation}\label{eqn:uwaves4TransmissionLinesCore:1380}
I(-l) = \frac{V^{+}}{Z_0} \lr{ 1 – \Gamma_{\textrm{L}}(-1) }.
\end{equation}
Define an input impedance as
\begin{equation}\label{eqn:uwaves4TransmissionLinesCore:1400}
\begin{aligned}
Z_{\textrm{in}}
&= \frac{V(-l)}{I(-l)} \\
&= Z_0 \frac{1 + \Gamma_{\textrm{L}}(-1)}{1 – \Gamma_{\textrm{L}}(-1)}
\end{aligned}
\end{equation}
This is analogous to
\begin{equation}\label{eqn:uwaves4TransmissionLinesCore:1420}
Z_{\textrm{L}}
= Z_0 \frac{1 + \Gamma_{\textrm{L}}}{1 – \Gamma_{\textrm{L}}}
\end{equation}
From \ref{eqn:uwaves4TransmissionLines:980}, we have
\begin{equation}\label{eqn:uwaves4TransmissionLinesCore:1440}
\begin{aligned}
Z_{\textrm{in}}
&= Z_0 \frac{Z_0 + Z_{\textrm{L}} + \lr{Z_{\textrm{L}} – Z_0} e^{-2 j \beta l}}{Z_0 + Z_{\textrm{L}} – \lr{Z_{\textrm{L}} – Z_0} e^{-2 j \beta l}} \\
&= Z_0 \frac{\lr{Z_0 + Z_{\textrm{L}}} e^{j\beta l} + \lr{Z_{\textrm{L}} –
Z_0} e^{- j \beta l}}{\lr{Z_0 + Z_{\textrm{L}}} e^{j\beta l} – \lr{Z_{\textrm{L}} – Z_0} e^{- j \beta l}} \\
&= Z_0
\frac
{Z_{\textrm{L}} \cos( \beta l ) + j Z_0 \sin(\beta l ) }
{Z_0 \cos( \beta l ) + j Z_{\textrm{L}} \sin(\beta l ) },
\end{aligned}
\end{equation}
or
\begin{equation}\label{eqn:uwaves4TransmissionLinesCore:1460}
\boxed{
Z_{\textrm{in}} =
\frac
{Z_{\textrm{L}} + j Z_0 \tan(\beta l ) }
{Z_0 + j Z_{\textrm{L}} \tan(\beta l ) }.
}
\end{equation}
This can be thought of as providing a reflection coefficient function along the line to the load at any point as sketched in fig. 12.
../../figures/ece1236/deck4TxlineFig12: fig. 12. Impedance transformation reflection on the line.
References
[1] David M Pozar. Microwave engineering. John Wiley \& Sons, 2009.
Like this:
Like Loading...