[Click here for a PDF of this post with nicer formatting] or [Click here for my notes compilation for this class]
Disclaimer
Peeter’s lecture notes from class. These may be incoherent and rough.
These are notes for the UofT course ECE1236H, Microwave and Millimeter-Wave Techniques, taught by Prof. G.V. Eleftheriades, covering ch 5. [3] content.
Terminology review
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:20}
Z_{\textrm{in}} = R + j X
\end{equation}
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:40}
Y_{\textrm{in}} = G + j B
\end{equation}
- \( Z_{\textrm{in}} \) : impedance
- \( R \) : resistance
- \( X \) : reactance
- \( Y_{\textrm{in}} \) : admittance
- \( G \) : conductance
- \( B \) : susceptance
Apparently this notation goes all the way back to Heavyside!
Multisection transformers
Using a transformation of the form fig. 1 it is possible to optimize for maximum power delivery, using for example a matching transformation \( Z_{\textrm{in}} = Z_1^2/R_{\textrm{L}} = Z_0\), or \( Z_1 = \sqrt{R_{\textrm{L}} Z_0} \). Unfortunately, such a transformation does not allow any control over the bandwidth. This results in a pinched frequency response for which the standard solution is to add more steps as sketched in fig. 2.
../../figures/ece1236/Feb10Fig2: fig. 2. Pinched frequency response.
../../figures/ece1236/deck7Fig1: fig. 3. Single and multiple stage impedance matching.
This can be implemented in electronics, or potentially geometrically as in this sketch of a microwave stripline transformer implementation fig. 3.
../../figures/ece1236/deck7Fig3: fig. 3. Stripline implementation of staged impedance matching.
To find a multistep transformation algebraically can be hard, but it is easy to do on a Smith chart. The rule of thumb is that we want to stay near the center of the chart with each transformation.
There is however, a closed form method of calculating a specific sort of multisection transformation that is algebraically tractable. That method uses a chain of \( \lambda/4 \) transformers to increase the bandwidth as sketched in fig. 4.
../../figures/ece1236/deck7Fig4: fig. 4. Multiple \( \lambda/4 \) transformers.
The total reflection coefficient can be approximated to first order by summing the reflections at each stage (without considering there may be other internal reflections of transmitted field components). Algebraically that is
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:60}
\Gamma(\Theta) \approx \Gamma_0
+ \Gamma_1 e^{-2 j \Theta} +
+ \Gamma_2 e^{-4 j \Theta} + \cdots
+ \Gamma_N e^{-2 N j \Theta},
\end{equation}
where
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:80}
\Gamma_n = \frac{Z_{n+1} – Z_n}{Z_{n+1} + Z_n}
\end{equation}
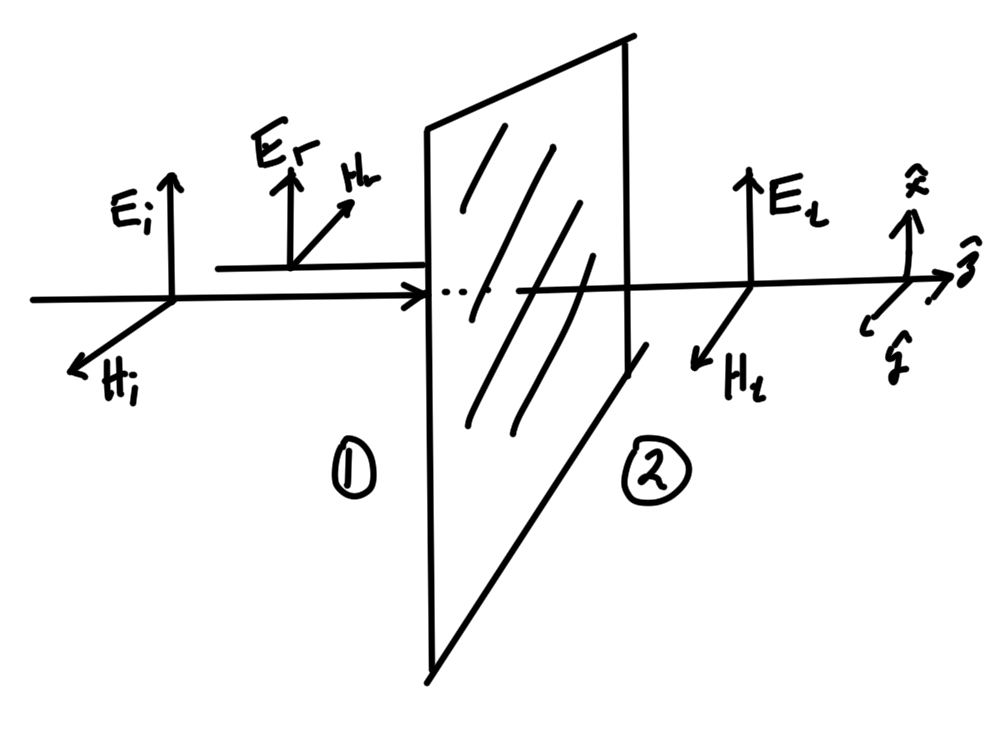
Why? Consider reflections at the Z_1, Z_2 interface as sketched in fig. 5.
../../figures/ece1236/deck7Fig5: fig. 5. Single stage of multiple \( \lambda/4\) transformers.
Assuming small reflections, where \( \Abs{\Gamma} \ll 1 \) then \( T = 1 + \Gamma \approx 1 \). Here
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:100}
\begin{aligned}
\Theta
&= \beta l \\
&= \frac{2 \pi}{\lambda} \frac{\lambda}{4} \\
&= \frac{\pi}{2}.
\end{aligned}
\end{equation}
at the design frequency \( \omega_0 \). We assume that \( Z_n \) are either monotonically increasing if \( R_{\textrm{L}} > Z_0 \), or decreasing if \( R_{\textrm{L}} < Z_0 \).
Binomial multisection transformers
Let
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:120}
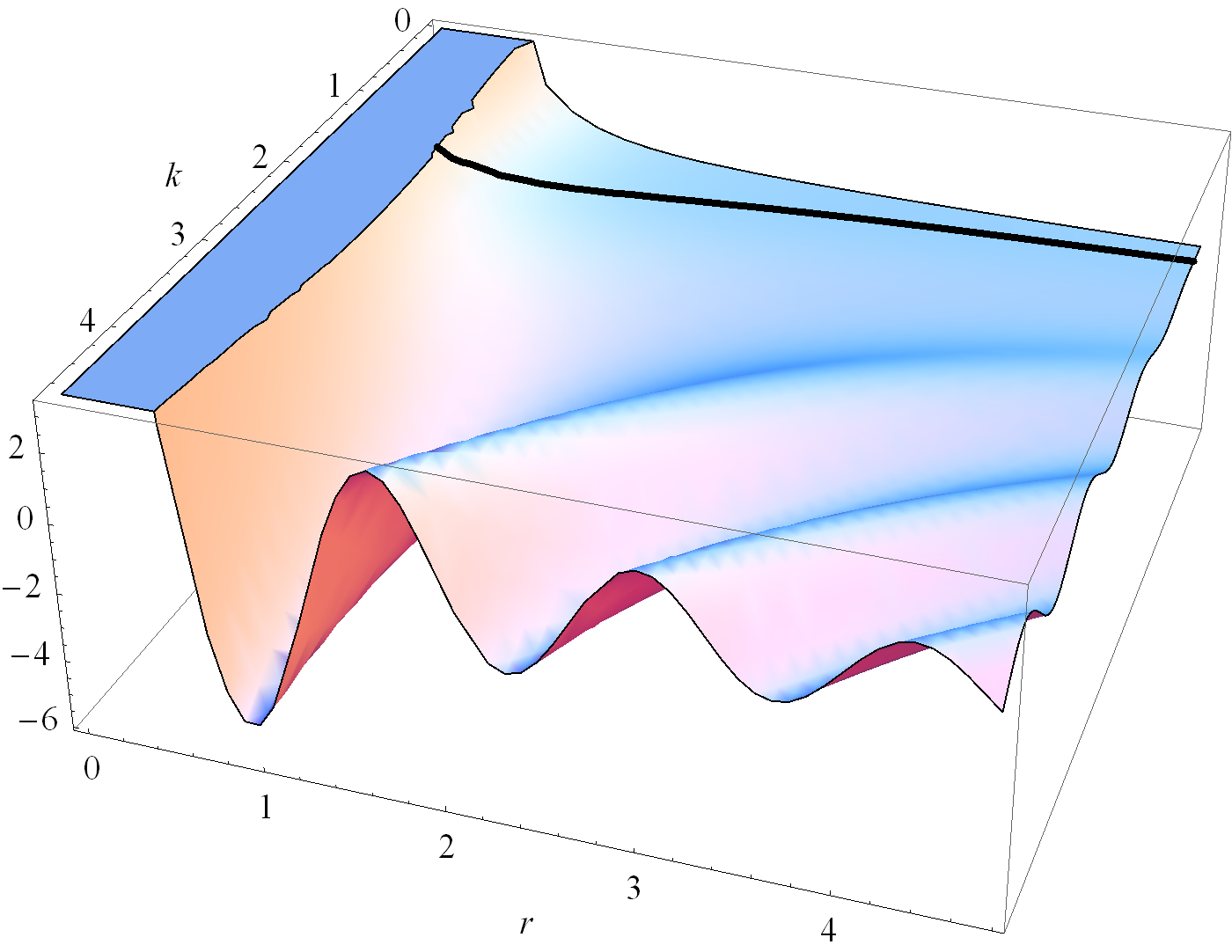
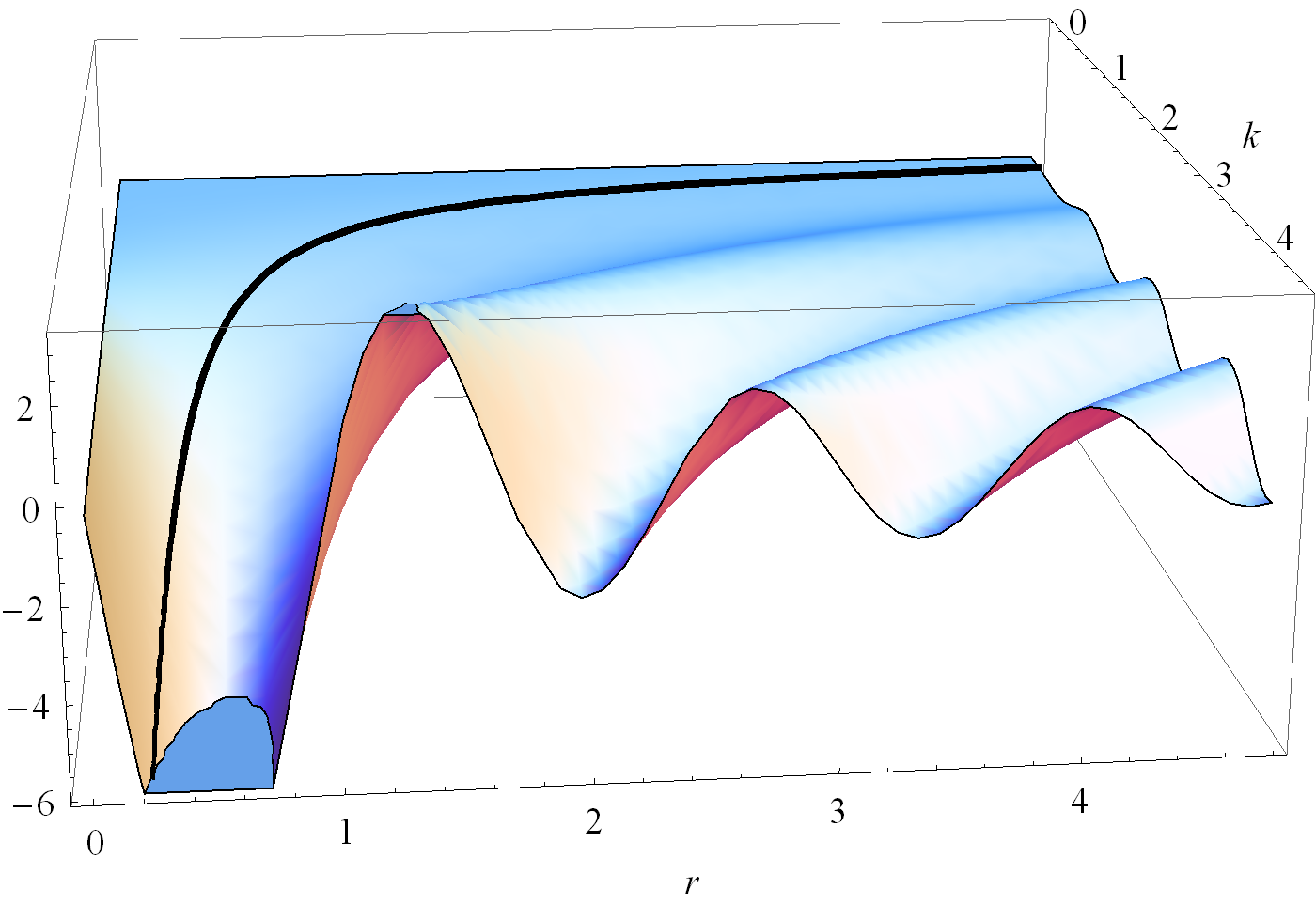
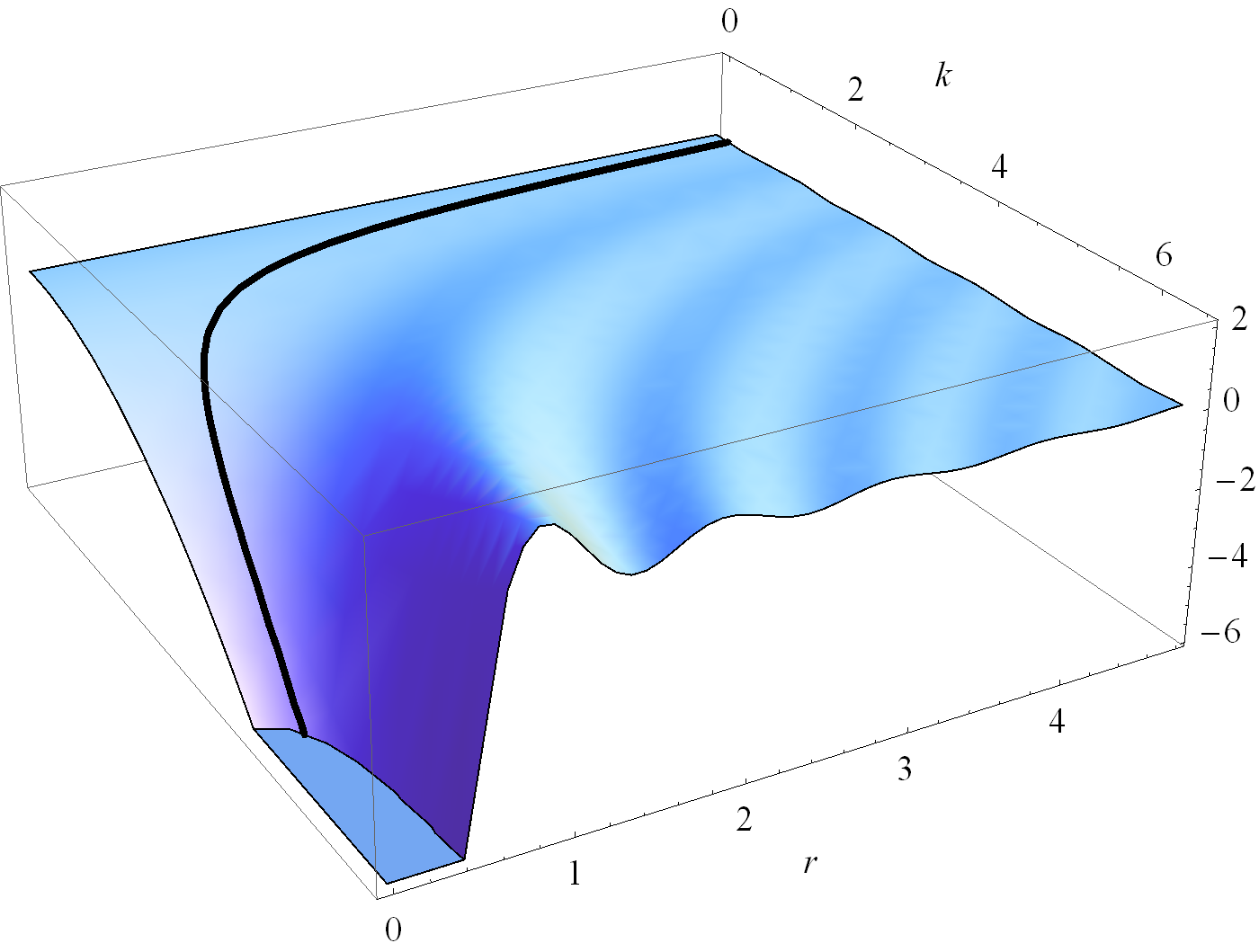
\Gamma(\Theta) = A \lr{ 1 + e^{-2 j \Theta} }^N
\end{equation}
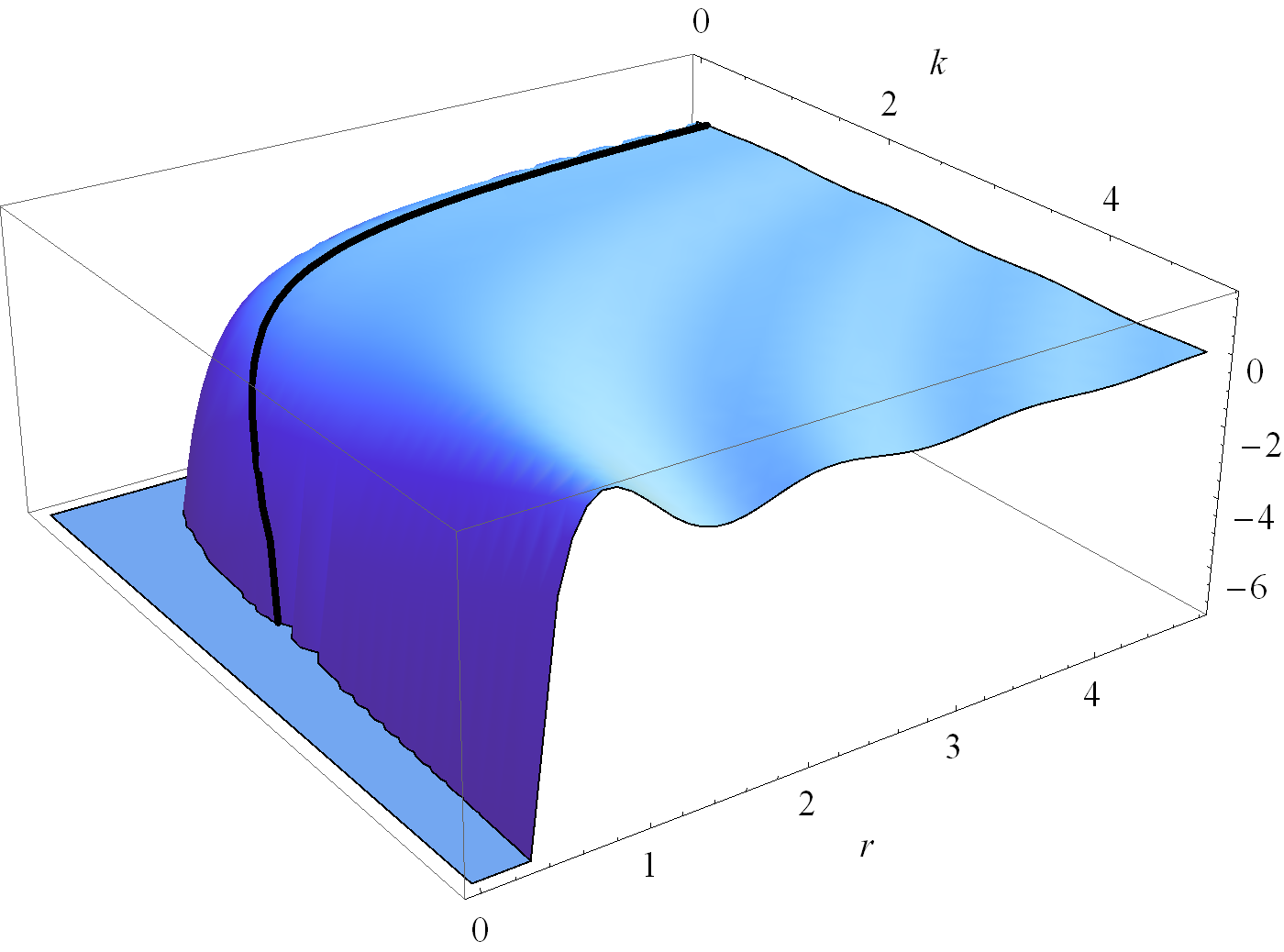
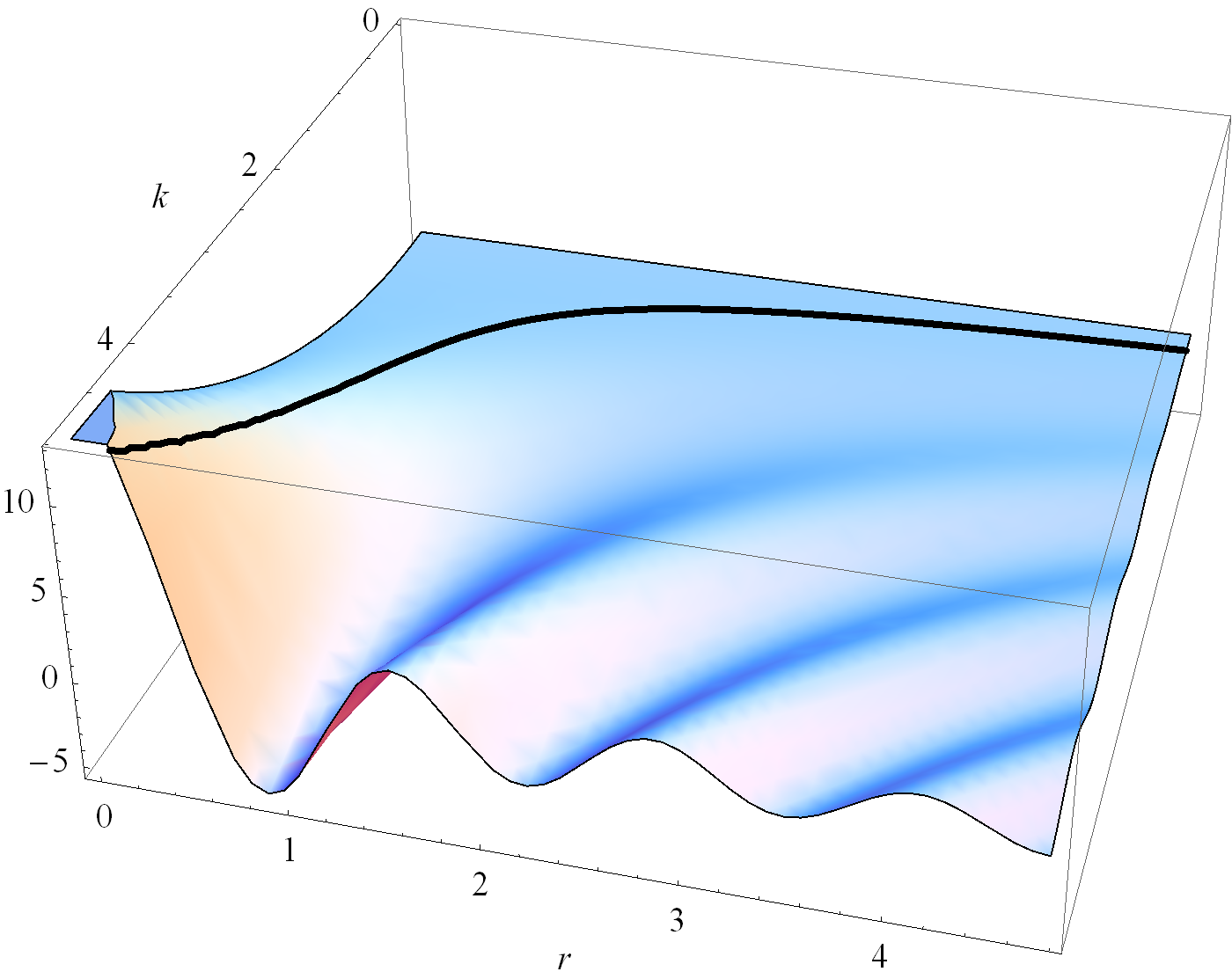
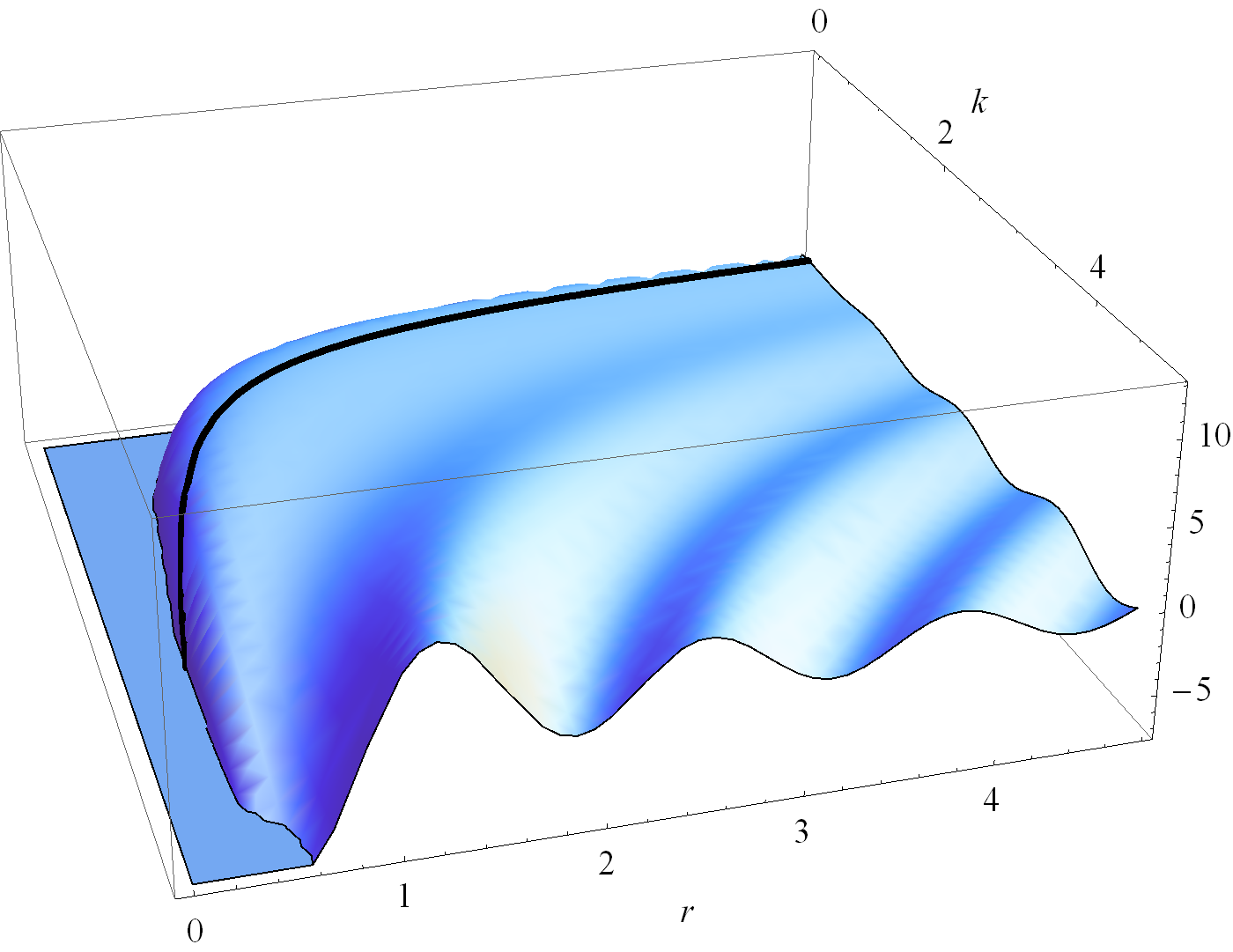
This type of a response is maximally flat, and is plotted in fig. 1.
../../figures/ece1236/multitransformerFig1: fig. 1. Binomial transformer.
The absolute value of the reflection coefficient is
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:160}
\begin{aligned}
\Abs{\Gamma(\Theta)}
&=
\Abs{A} \lr{ e^{j \Theta} + e^{- j \Theta} }^N \\
&=
2^N \Abs{A} \cos^N\Theta.
\end{aligned}
\end{equation}
When \( \Theta = \pi/2 \) this is clearly zero. It’s derivatives are
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:180}
\begin{aligned}
\frac{d \Abs{\Gamma}}{d\Theta} &= -N \cos^{N-1} \Theta \sin\Theta \\
\frac{d^2 \Abs{\Gamma}}{d\Theta^2} &= -N \cos^{N-1} \Theta \cos\Theta N(N-1) \cos^{N-2} \Theta \sin\Theta \\
\frac{d^3 \Abs{\Gamma}}{d\Theta^3} &= \cdots
\end{aligned}
\end{equation}
There is a \( \cos^{N-k} \) term for all derivatives \( d^k/d\Theta^k \) where \( k \le N-1 \), so for an N-section transformer
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:140}
\frac{d^n}{d\Theta^n} \Abs{\Gamma(\Theta)}_{\omega_0} = 0,
\end{equation}
for \( n = 1, 2, \cdots, N-1 \). The constant \( A \) is determined by the limit \( \Theta \rightarrow 0 \), so
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:200}
\Gamma(0) = 2^N A = \frac{Z_{\textrm{L}} – Z_0}{Z_{\textrm{L}} + Z_0},
\end{equation}
because the various \( \Theta \) sections become DC wires when the segment length goes to zero. This gives
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:220}
\boxed{
A = 2^{-N} \frac{Z_{\textrm{L}} – Z_0}{Z_{\textrm{L}} + Z_0}.
}
\end{equation}
The reflection coefficient can now be expanded using the binomial theorem
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:240}
\begin{aligned}
\Gamma(\Theta)
&= A \lr{ 1 + e^{ 2 j \Theta } }^N \\
&= \sum_{k = 0}^N \binom{N}{k} e^{ -2 j k \Theta}
\end{aligned}
\end{equation}
Recall that
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:260}
\binom{N}{k} = \frac{N!}{k! (N-k)!},
\end{equation}
providing a symmetric set of values
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:280}
\begin{aligned}
\binom{N}{1} &= \binom{N}{N} = 1 \\
\binom{N}{1} &= \binom{N}{N-1} = N \\
\binom{N}{k} &= \binom{N}{N-k}.
\end{aligned}
\end{equation}
Equating \ref{eqn:uwavesDeck7MultisectionTransformersCore:240} with \ref{eqn:uwavesDeck7MultisectionTransformersCore:60} we have
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:300}
\boxed{
\Gamma_k = A \binom{N}{k}.
}
\end{equation}
Approximation for \( Z_k \)
From [1] (4.6.4), a log series expansion valid for all \( z \) is
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:320}
\ln z = \sum_{k = 0}^\infty \inv{2 k + 1} \lr{ \frac{ z – 1 }{z + 1} }^{2k + 1},
\end{equation}
so for \( x \) near unity a first order approximation of a logarithm is
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:340}
\ln x \approx 2 \frac{x -1}{x+1}.
\end{equation}
Assuming that \( Z_{k+1}/Z_k \) is near unity we have
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:360}
\begin{aligned}
\inv{2} \ln \frac{Z_{k+1}}{Z_k}
&\approx
\frac{ \frac{Z_{k+1}}{Z_k} – 1 }{\frac{Z_{k+1}}{Z_k} + 1} \\
&=
\frac{ Z_{k+1} – Z_k }{Z_{k+1} + Z_k} \\
&=
\Gamma_k.
\end{aligned}
\end{equation}
Using this approximation, we get
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:380}
\begin{aligned}
\ln \frac{Z_{k+1}}{Z_k}
&\approx
2 \Gamma_k \\
&= 2 A \binom{N}{k} \\
&= 2 \lr{2^{-N}} \binom{N}{k} \frac{Z_{\textrm{L}} – Z_0}{Z_{\textrm{L}} + Z_0} \\
&\approx
2^{-N} \binom{N}{k} \ln \frac{Z_{\textrm{L}}}{Z_0},
\end{aligned}
\end{equation}
I asked what business do we have in assuming that \( Z_{\textrm{L}}/Z_0 \) is near unity? The answer was that it isn’t but surprisingly it works out well enough despite that. As an example, consider \( Z_0 = 100 \Omega \) and \( R_{\textrm{L}} = 50 \Omega \). The exact expression
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:880}
\begin{aligned}
\frac{Z_{\textrm{L}} – Z_0}{Z_{\textrm{L}} + Z_0}
&= \frac{100-50}{100+50} \\
&= -0.333,
\end{aligned}
\end{equation}
whereas
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:900}
\inv{2} \ln \frac{Z_{\textrm{L}}}{Z_0} = -0.3466,
\end{equation}
which is pretty close after all.
Regardless of whether or not that last approximation is used, one can proceed iteratively to \( Z_{k+1} \) starting with \( k = 0 \).
Bandwidth
To evaluate the bandwidth, let \( \Gamma_{\mathrm{m}} \) be the maximum tolerable reflection coefficient over the passband, as sketched in fig. 6.
../../figures/ece1236/deck7Fig6: fig. 6. Max tolerable reflection.
That is
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:400}
\begin{aligned}
\Gamma_m
&= 2^N \Abs{A} \Abs{\cos \Theta_m }^N \\
&= 2^N \Abs{A} \cos^N \Theta_m,
\end{aligned}
\end{equation}
for \( \Theta_m < \pi/2 \). Then \begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:420} \Theta_m = \arccos\lr{ \inv{2} \lr{ \frac{\Gamma_{\mathrm{m}}}{\Abs{A}}}^{1/N} } \end{equation} The relative width of the interval is \begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:440} \begin{aligned} \frac{\Delta f_{\mathrm{max}}}{f_0} &= \frac{\Delta \Theta_{\mathrm{max}}}{\Theta_0} \\ &= \frac{2 (\Theta_0 - \Theta_{\mathrm{max}}}{\Theta_0} \\ &= 2 - \frac{2 \Theta_{\mathrm{max}}}{\Theta_0} \\ &= 2 - \frac{4 \Theta_{\mathrm{max}}}{\pi} \\ &= 2 - \frac{4 }{\pi} \arccos\lr{ \inv{2} \lr{ \frac{\Gamma_{\mathrm{max}}}{\Abs{A}}}^{1/N} }. \end{aligned} \end{equation}
Example
Design a 3-section binomial transformer to match \( R_{\textrm{L}} = 50 \Omega \) to a line \( Z_0 = 100 \Omega \). Calculate the BW based on a maximum \( \Gamma_{\textrm{m}} = 0.05 \).
Solution
The scaling factor
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:460}
\begin{aligned}
A
&= 2^{-N} \frac{Z_{\textrm{L}} – L_0}{Z_{\textrm{L}} + Z_0} \\
&\approx
\inv{2^{N+1}} \ln \frac{Z_{\textrm{L}}}{Z_0} \\
&= -0.0433
\end{aligned}
\end{equation}
Now use
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:940}
\ln \frac{Z_{n+1}}{Z_n}
\approx 2^{-N} \binom{N}{n} \ln \frac{R_{\textrm{L}}}{Z_0},
\end{equation}
starting from
- \( n = 0 \).
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:480}
\ln \frac{Z_{1}}{Z_0} \approx 2^{-3} \binom{3}{0} \ln \frac{R_{\textrm{L}}}{Z_0},
\end{equation}or
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:500}
\begin{aligned}
\ln Z_{1}
&= \ln Z_0 + 2^{-3} \binom{3}{0} \ln \frac{R_{\textrm{L}}}{Z_0} \\
&= \ln 100 + 2^{-3} (1) \ln 0.5 \\
&= 4.518,
\end{aligned}
\end{equation}so
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:520}
Z_1 = 91.7 \Omega
\end{equation} - \( n = 1 \)
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:540}
\ln Z_{2}
= \ln Z_1 + 2^{-3} \binom{3}{1} \ln \frac{50}{100} = 4.26
\end{equation}so
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:560}
Z_2 = 70.7 \Omega
\end{equation} - \( n = 2 \)
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:580}
\ln Z_{3} = \ln Z_2 + 2^{-3} \binom{3}{2} \ln \frac{50}{100} = 4.0,
\end{equation}so
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:600}
Z_3 = 54.5 \Omega.
\end{equation}
With the fractional BW for \( \Gamma_m = 0.05 \), where \( 10 \log_{10} \Abs{\Gamma_m}^2 = -26 \) dB}.
\begin{equation}\label{eqn:uwavesDeck7MultisectionTransformersCore:920}
\begin{aligned}
\frac{\Delta f}{f_0}
&\approx
2 – \frac{4}{\pi} \arccos\lr{ \inv{2} \lr{ \frac{\Gamma_m}{\Abs{A}} }^{1/N} } \\
&=
2 – \frac{4}{\pi} \arccos\lr{ \inv{2} \lr{ \frac{0.05}{0.0433} }^{1/3} } \\
&= 0.7
\end{aligned}
\end{equation}
At \( 2 \) GHz, \( BW = 0.7 \) (70%), or \( 1.4 \) GHz, which is the range \( [2.3,2.7] \) GHz, whereas a single \( \lambda/4 \) transformer \( Z_T = \sqrt{ (100)(50) } = 70.7 \Omega \) yields a BW of just \( 0.36 \) GHz (18%).
References
[1] DLMF. NIST Digital Library of Mathematical Functions. https://dlmf.nist.gov/, Release 1.0.10 of 2015-08-07. URL https://dlmf.nist.gov/. Online companion to Olver:2010:NHMF.
[2] F. W. J. Olver, D. W. Lozier, R. F. Boisvert, and C. W. Clark, editors. NIST Handbook of Mathematical Functions. Cambridge University Press, New York, NY, 2010. Print companion to NIST:DLMF.
[3] David M Pozar. Microwave engineering. John Wiley & Sons, 2009.